كيفية صنع مكنسة كهربائية روبوتية بنفسك - فكرتان للتجميع
في ظل نمط الحياة السريع اليوم، لا يُعدّ الحفاظ على نظافة المنزل أمرًا سهلاً دائمًا. لكن التكنولوجيا الحديثة تُساعد في ذلك. تتواجد المكانس الكهربائية الروبوتية منذ أكثر من 15 عامًا. وهي عادةً ما تُشبه قرصًا كبيرًا يتحرك في أرجاء الغرفة وفق نمط مُحدد مسبقًا أو بشكل عشوائي (إلى أن يصطدم بشيء ما) ويجمع الأوساخ. نقدم لكم طريقتين مُفصلتين خطوة بخطوة لصنع مكنسة كهربائية روبوتية خاصة بكم.
مواد التجميع
لذا، لتجميع مكنسة كهربائية روبوتية، عليك فهم مكوناتها، فلنستعرضها خطوة بخطوة. يجب أن تتحرك في أرجاء الغرفة تلقائيًا، لذا فهي تحتاج إلى محركات - من اثنين إلى أربعة، حسب التصميم النهائي - بالإضافة إلى القدرة على تغيير اتجاه الدوران والسرعة، مما يعني أنك تحتاج إلى لوحة تحكم بالمحركات. إذا كنت تستخدم محركات تيار مستمر، فستحتاج إلى لوحة بأربعة ترانزستورات (جسر H).
يجب أن يكون الروبوت المكنسة الكهربائية المصنوع منزليًا قادرًا على رصد الاصطدامات مع الجدران والأثاث. يتطلب ذلك وجود مستشعرات للعوائق ومفاتيح حدية على "المصد". كما يلزم وجود عنصر التشغيل - المكنسة الكهربائية نفسها - ويجب تصميمها للعمل على طاقة تيار مستمر منخفضة الجهد (مثل 12 فولت).
بالإضافة إلى المكنسة الكهربائية، ستحتاج إلى فرشاة دوارة لتنظيف السطح، ورفع وبر السجادة، وإزالة الأوساخ. وهذا يتطلب محركًا أو محركين إضافيين.
نظامٌ يتحكم بكل هذا. أبسط الخيارات هو لوحة أردوينو. أي لوحة ستفي بالغرض؛ لوحات نانو أو برو ميني هي الأنسب لهذا العمل.
الفكرة رقم 1: مكنسة كهربائية روبوتية مصنوعة من الكرتون
قاعدة الروبوت مصنوعة من ورق مقوى سميك. يُفضل لصقها على طبقتين مع توجيه الألياف بشكل عمودي. أما بالنسبة للمكونات التقنية، فستحتاج إلى مجموعة الأجزاء التالية:
- أي لوحة أردوينو.
- لوحة التجارب أو لوحة تجارب بسيطة، من حيث المبدأ يمكنك الاستغناء عنها، فقط قم بلحام كل شيء.
- 2 مستشعرات مسافة فوق صوتية (محدد المدى).
- توربين المكنسة الكهربائية.
- محرك صغير أو مبرد من جهاز كمبيوتر.
- محركات مزودة بعلب تروس وعجلات.
- وحدة تحكم المحرك.
- أسلاك لتوصيلات الدوائر الكهربائية.
- البطاريات وجهاز التحكم بالشحن.
يحتاج الروبوت إلى ثلاث بطاريات ليثيوم لتشغيله، كل منها بجهد 3.7 فولت. يلزم وجود وحدة تحكم لشحنها، مثل تلك الموجودة في الصورة.

وحدة التحكم
للتحكم في محركات الروبوت، يُنصح باستخدام وحدة تعتمد على شريحة L298. هذه الوحدة عبارة عن دائرة جسر H، ويمكنك تجميعها بنفسك من مكونات منفصلة، ولكن شراء لوحة جاهزة يُعدّ خيارًا أكثر موثوقية. فهي تتيح لك ضبط سرعة مكنسة الروبوت وتغيير اتجاهها.

وحدة التحكم
لضبط السرعة، تُطبَّق إشارة PWM على منفذ ENA أو ENB، ولتحديد اتجاه الدوران، تُطبَّق إشارات معاكسة على IN1 وIN2 لمحرك واحد، وعلى IN3 وIN4 للمحرك الآخر. إذا كانت قيمة IN1 منطقية 1 وقيمة IN2 منطقية 0، يدور المحرك في اتجاه واحد. لتغيير الاتجاه، بدِّل القيمتين 1 و0. يجب تجميعها باستخدام لوحة أردوينو وفقًا للمخطط التالي (يمكنك استخدام أي منافذ؛ حددها في البرنامج).

دائرة أردوينو
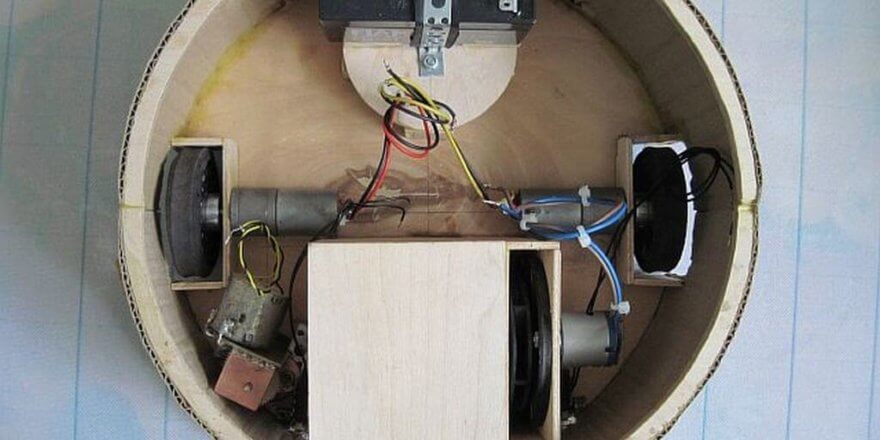
بعد ذلك، ستحتاج إلى صنع قاعدة من الورق المقوى وتثبيت العجلات عليها. يجب أن تحصل على شيء كهذا:

قاعدة من الورق المقوى
هذه صورة من الأسفل. عجلتان دافعتان مع علبة تروس زاوية وعجلة دوارة:

قاعدة العجلات
الآن عليك تجميع الدائرة الكهربائية التي سيتم تركيبها على القاعدة. يجب أن يكون قطر القاعدة حوالي 30 سم لاستيعاب كل من المكونات الإلكترونية ووحدة المكنسة الكهربائية نفسها.

تجميع القضية
بدلاً من أجهزة تحديد المدى، يمكنك استخدام نظام مثبت على المصد ومتصل بمفاتيح حدية. عند الاصطدام بعائق، سيشير نظام التحكم إلى تغيير في الاتجاه.

المصد
يمكنك أيضًا صنع مصدات تلامس بنفسك. ستحتاج إلى سلك رفيع وصلب، مثل سلك مزدوج مجدول. للقيام بذلك، أنشئ نقطة تلامس على الجانب الداخلي للمصد باستخدام ورق معدني، وثبّت السلك كما هو موضح أدناه. عندما يصطدم الروبوت المكنسة الكهربائية بالأثاث أو الجدران، سيحدث تلامس. اضبط المسافة بين السلك والورق المعدني لتحقيق الحساسية المطلوبة ومنع الإنذارات الكاذبة. يتم تطبيق جهد 5 فولت على الورق المعدني، ويتصل السلك بمدخل أردوينو، مع سحبه إلى القطب السالب عبر مقاومة قيمتها عدة كيلو أوم.

واقي تلامس مصنوع منزليًا
يعمل الجهاز بالبطاريات؛ ويمكن استخدام منظمات الجهد الخطي مثل l7805 لتشغيل نظام التحكم. كما يُعد محول الجهد الخافض، مثل LM2596، مناسبًا لضبط سرعة المحرك.
أصعب جزء هو تصميم وتجميع المكنسة الكهربائية. إليك رسم تخطيطي تقريبي:

رسم تخطيطي للمكنسة الكهربائية
نقوم بفصل شفرات المروحة الأصلية ونركب توربين مكنسة كهربائية على دوارها. من المهم تثبيت التوربين بدقة في المنتصف، وإلا ستحدث اختلالات واهتزازات.

توربين آلي
هذا هو شكل الجزء الخلفي من التوربين عند تركيبه على دوار التبريد. ويمكن تثبيته باستخدام الغراء الساخن أو الغراء الفائق.

منظر للتوربين من الداخل
هذا كل ما في الأمر، دليل خطوة بخطوة لتجميع مكنسة كهربائية روبوتية مصنوعة من مواد معاد تدويرها. خوارزمية تشغيلها كالتالي: تتحرك المكنسة الكهربائية الروبوتية للأمام حتى تصطدم بعائق. بعد الاصطدام (أو الاقتراب، إذا كنت تستخدم أجهزة استشعار المسافة بالموجات فوق الصوتية)، تتوقف، وتتحرك للخلف مسافة محددة مسبقًا، ثم تستدير بزاوية عشوائية، وتواصل حركتها.
الفكرة الثانية: روبوت يشبه المصنع تقريبًا
نقدم لكم مشروعًا أبسط لمكنسة كهربائية روبوتية. إليكم شكلها بعد تجميعها:

مكنسة كهربائية روبوتية منزلية الصنع
يتكون نظام الملاحة من ستة مستشعرات للأشعة تحت الحمراء للكشف عن العوائق. في حال عدم تفعيل أي منها، يتم توفير مستشعري تلامس (مفتاحي حد). يستخدم نظام التحكم في المحرك نفس وحدة التشغيل المزودة بشريحة L298N. لتجميعه، ستحتاج إلى:
- تم استخدام لوحة أردوينو، في الأصل Pro-mini.
- محول USB-TTL لبرمجة هذا الطراز من أردوينو. إذا كنت تستخدم أردوينو نانو، فلن تحتاج إليه، لأنه يدعم البرمجة عبر منفذ USB.
- مشغل لمحركات L298N.
- محركات للعجلات مزودة بعلبة تروس.
- 6 مستشعرات للأشعة تحت الحمراء.
- محركات للتوربين (إن أمكن، محركات أكثر قوة).
- مروحة توربين المكنسة الكهربائية.
- يمكن أن تكون محركات الفرشاة أي شيء.
- مستشعران للتصادم.
قم بتجميع كل هذا وفقًا لهذا المخطط:

مخطط تجميع مكنسة الروبوت الكهربائية
لتجميع دائرة إمداد الطاقة لمكنسة كهربائية روبوتية، ستحتاج إلى:
- أربع بطاريات ليثيوم، من النوع 18650، مناسبة.
- محولان DC/DC (محول رفع الجهد ومحول خفض الجهد).
- وحدة تحكم لشحن وتفريغ بطاريتين (ابحث عبر الإنترنت عن "وحدة تحكم بطارية ليثيوم أيون ثنائية الخلايا"). تستخدم الدائرة توصيلًا متسلسلًا لخليتين موصولتين على التوازي، مما ينتج عنه جهد خرج أكبر من 7.4 فولت. تُستخدم الدائرة المتوازية لزيادة سعة البطارية وعمرها.
هذا هو مخطط مصدر الطاقة لهذا الروبوت:

مخطط مصدر الطاقة
بالإضافة إلى ذلك، ستحتاج إلى البلاستيك (PVC) أو أي مادة أخرى لجسم الروبوت؛ يمكنك طباعته على طابعة ثلاثية الأبعاد إذا كانت لديك مثل هذه الفرصة.
يتطلب هذا المشروع الذي يمكنك تنفيذه بنفسك برنامجًا ثابتًا. إليك مثال على خوارزمية تنظيف عشوائية وجدناها على الإنترنت. حمّل البرنامج من هنا: برنامج ثابت لمكنسة كهربائية روبوتية.
تناولت هذه المقالة تصميمين لروبوت تنظيف الأرضيات يمكنك تقليدهما وبنائهما بنفسك. يمكنك بناء جهاز تنظيف آلي للغرف بتكلفة تتراوح بين 30 و100 دولار أمريكي. تُعدّ البطاريات والمحركات ولوحات أردوينو من أغلى المكونات. إذا نجحت في بناء روبوت تنظيف أرضيات منزلي الصنع أو توصلت إلى تصميم مختلف، فنرجو منك مشاركة تجربتك في التعليقات. نرحب بالتواصل المفتوح!
وأخيرًا، نوصي بمشاهدة هذه الفيديوهات، التي توضح بوضوح بعض الأفكار الإضافية لصنع مكنسة كهربائية روبوتية في المنزل:








شكراً على المقال!
للعلم، كلمة "dvigatelya" ليست كلمة في اللغة الروسية.
لكن هذا مجرد عيب تجميلي في المنتج.
مرحباً، أنا يوري، أُنهي مشروع بناء، وهناك كمية هائلة من الغبار. خطرت لي فكرة صنع مكنسة كهربائية روبوتية، لكن معلوماتي عن الإلكترونيات محدودة للغاية. بحثت عن بعض المواد، وأعجبتني فرشاة مكنسة ميليون، فإذا رُكّبت على مكنسة كهربائية روبوتية، ستترك زاوية صغيرة دون تنظيف، ويمكن تعديل الفرشاة الأفقية بأي شكل تريده.
شكراً جزيلاً! هذا واضح جداً! وكيف أضمن إعادة الطعام إلى القاعدة؟