Comment fabriquer soi-même un aspirateur robot – 2 idées de montage
Dans le rythme effréné de la vie moderne, garder sa maison propre n'est pas toujours chose aisée. Heureusement, la technologie moderne peut nous faciliter la tâche. Les aspirateurs robots existent depuis plus de 15 ans. Ils se présentent généralement sous la forme d'un gros disque qui se déplace dans la pièce selon un parcours prédéfini ou de manière aléatoire (jusqu'à rencontrer un obstacle) et aspire les débris. Nous vous proposons deux tutoriels détaillés pour fabriquer votre propre aspirateur robot.
Matériaux pour l'assemblage
Pour assembler un aspirateur robot, il est essentiel de comprendre ses composants. Examinons-les étape par étape. Il doit pouvoir se déplacer seul dans la pièce ; il lui faut donc des moteurs (deux à quatre, selon le modèle final), ainsi que la possibilité d'inverser le sens de rotation et la vitesse, ce qui implique l'utilisation d'une carte de contrôle moteur. Si vous utilisez des moteurs à courant continu, vous aurez besoin d'une carte à quatre transistors (un pont en H).
Un aspirateur robot fait maison doit détecter les collisions avec les murs et les meubles. Cela nécessite des capteurs d'obstacles et des interrupteurs de fin de course sur le pare-chocs. L'élément actif — l'aspirateur — est également indispensable. Il doit être conçu pour fonctionner sur une alimentation CC basse tension (par exemple, 12 V).
En plus de l'aspirateur, il vous faut une brosse rotative pour nettoyer la surface, redresser les fibres du tapis et enlever les débris. Cela nécessite un ou deux moteurs supplémentaires.
Un système permettra de contrôler l'ensemble. L'option la plus simple est une carte Arduino. N'importe quelle carte conviendra ; les cartes Nano ou Pro Mini sont parfaitement adaptées.
Idée n° 1 : Un aspirateur robot en carton
La base du robot est en carton épais. Il est préférable de la coller en plusieurs couches, en alignant les fibres perpendiculairement. Pour ses composants techniques, vous aurez besoin des pièces suivantes :
- N'importe quelle carte Arduino.
- Une plaque d'essai ou une simple plaque d'essai, en principe on peut s'en passer, il suffit de tout souder.
- 2 capteurs de distance à ultrasons (télémètre).
- Turbine d'aspirateur.
- Un petit moteur ou un refroidisseur d'ordinateur.
- Moteurs avec boîtes de vitesses et roues.
- Contrôleur moteur.
- Fils pour les connexions de circuit.
- Batteries et contrôleur de charge.
Le robot nécessite trois batteries au lithium pour fonctionner. Chacune a une tension de 3,7 V. Un contrôleur est nécessaire pour les recharger, comme celui présenté sur la photo :

Contrôleur
Pour contrôler les moteurs du robot, il est pratique d'utiliser un module basé sur la puce L298. Il s'agit d'un circuit en pont en H ; vous pouvez le construire vous-même à partir de composants individuels, mais l'achat d'une carte prête à l'emploi est plus fiable. Ce module vous permet de régler la vitesse de l'aspirateur robot et de changer sa direction.

module de contrôle
Pour réguler la vitesse, un signal PWM est appliqué à la broche ENA ou ENB. Pour définir le sens de rotation, des signaux opposés sont appliqués aux broches IN1 et IN2 pour un moteur, et aux broches IN3 et IN4 pour l'autre. Si IN1 est à l'état logique 1 et IN2 à l'état logique 0, le moteur tourne dans un sens. Pour inverser le sens de rotation, inversez les 1 et les 0. Le montage doit être réalisé avec une carte Arduino en suivant le schéma ci-dessous (vous pouvez utiliser n'importe quelles broches ; spécifiez-les dans le programme).

circuit Arduino
Ensuite, vous devez fabriquer une base en carton et y fixer les roues. Vous devriez obtenir quelque chose comme ceci :

Base en carton
Voici une vue de dessous. Deux roues motrices avec un réducteur angulaire et une roue pivotante :

Empattement
Il vous faut maintenant assembler le circuit qui sera monté sur le socle. Ce dernier doit avoir un diamètre d'environ 30 cm pour accueillir à la fois l'électronique et l'aspirateur.

Assemblage de l'étui
Au lieu de télémètres, vous pouvez utiliser un système fixé au pare-chocs et relié à des interrupteurs de fin de course. En cas de collision avec un obstacle, le système de commande signalera un changement de direction.

Pare-chocs
Vous pouvez aussi fabriquer vous-même les butoirs de contact. Il vous faudra un fil fin mais rigide, comme un câble à paires torsadées. Pour cela, créez une pastille de contact à l'intérieur du butoir à l'aide d'une feuille d'aluminium et fixez-y le fil comme indiqué ci-dessous. Lorsque l'aspirateur robot entrera en collision avec un meuble ou un mur, le contact se fera. Ajustez la distance entre le fil et la feuille d'aluminium pour obtenir la sensibilité souhaitée et éviter les fausses alarmes. Appliquez une tension de 5 V à la feuille d'aluminium et connectez le fil à l'entrée de l'Arduino, reliée à la masse par une résistance de quelques kiloohms.

Pare-chocs de contact fait maison
L'appareil est alimenté par des batteries ; des stabilisateurs linéaires tels que le L7805 peuvent être utilisés pour alimenter le système de commande. Un convertisseur abaisseur, tel que le LM2596, convient pour ajuster la vitesse du moteur.
Le plus difficile est de concevoir et d'assembler l'aspirateur. Voici un schéma sommaire :

schéma d'aspirateur
On retire les pales du ventilateur d'origine et on fixe une turbine d'aspirateur sur son rotor. Il est important de bien centrer la turbine, sinon cela risque de créer des déséquilibres et des vibrations.

turbine robotisée
Voici à quoi ressemble l'arrière de la turbine une fois fixée au rotor du refroidisseur. Elle peut être fixée avec de la colle thermofusible ou de la superglue.

Vue de l'intérieur de la turbine
Voilà, c'est tout ! Un guide étape par étape pour assembler un aspirateur robot à partir de matériaux de récupération. Son fonctionnement est le suivant : l'aspirateur robot avance jusqu'à rencontrer un obstacle. Après la collision (ou l'approche, si vous utilisez des capteurs à ultrasons), il s'arrête, recule d'une distance prédéterminée, tourne selon un angle aléatoire, puis reprend sa route.
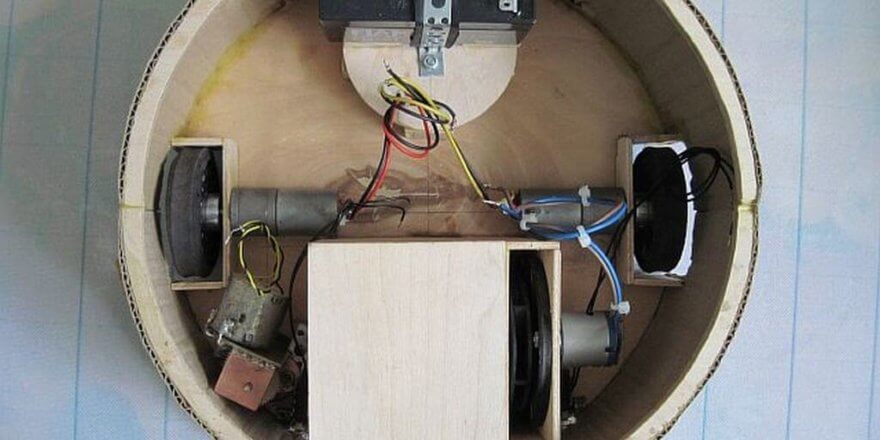
Idée n° 2 : Un robot presque semblable à une usine
Nous vous présentons un projet d'aspirateur robot simplifié. Voici à quoi il ressemble une fois assemblé :

Aspirateur robot fait maison
Le système de navigation est composé de six capteurs d'obstacles infrarouges. Si aucun capteur n'est déclenché, deux capteurs de contact (interrupteurs de fin de course) prennent le relais. Le système de commande du moteur utilise le même circuit intégré L298N. Pour l'assembler, vous aurez besoin de :
- Une carte Arduino, initialement Pro-mini, a été utilisée.
- Un adaptateur USB-TTL est nécessaire pour programmer ce modèle Arduino. Si vous utilisez un Arduino Nano, cet adaptateur est inutile, car il prend en charge la programmation via USB.
- Pilote pour moteurs L298N.
- Moteurs pour roues avec boîte de vitesses.
- 6 capteurs infrarouges.
- Moteurs pour la turbine (si possible, plus puissants).
- Turbine d'aspirateur.
- Les moteurs à balais peuvent être de n'importe quel type.
- 2 capteurs de collision.
Assemblez le tout selon ce schéma :

schéma d'assemblage de l'aspirateur robot
Pour assembler le circuit d'alimentation d'un aspirateur robot, vous aurez besoin de :
- 4 batteries au lithium, de type 18650, conviennent.
- 2 convertisseurs CC/CC (élévateur et abaisseur).
- Contrôleur de charge et de décharge pour deux batteries (recherchez « contrôleur Li-ion 2S » en ligne). Le circuit utilise un branchement en série de deux cellules connectées en parallèle, ce qui permet d'obtenir une tension de sortie supérieure à 7,4 V. Le montage en parallèle permet d'augmenter la capacité et la durée de vie de la batterie.
Voici le schéma d'alimentation de ce robot :

Schéma d'alimentation
De plus, vous aurez besoin de plastique (PVC) ou de tout autre matériau pour le corps du robot ; vous pouvez l'imprimer sur une imprimante 3D si vous en avez la possibilité.
Ce projet DIY nécessite un firmware. Voici un exemple d'algorithme de nettoyage aléatoire trouvé en ligne. Téléchargez le programme ici : micrologiciel pour un aspirateur robot.
Cet article présente deux modèles d'aspirateurs robots que vous pouvez reproduire et construire vous-même. Vous pouvez fabriquer un aspirateur robot automatique pour un budget compris entre 30 et 100 dollars. Les composants les plus coûteux sont les batteries, les moteurs et les cartes Arduino. Si vous avez déjà construit un aspirateur robot ou si vous avez imaginé un autre modèle, n'hésitez pas à partager vos exemples dans les commentaires. Nous encourageons les échanges !
Enfin, nous vous recommandons de visionner ces vidéos, qui présentent clairement quelques idées supplémentaires pour fabriquer un aspirateur robot chez soi :








Merci pour l'article !
Pour votre information, « dvigatelya » n'est pas un mot russe.
Mais il ne s'agit que d'un défaut esthétique de l'article.)
Salut, je m'appelle Yuri. Je termine un chantier et il y a un vrai champ de bataille ! J'ai eu l'idée de fabriquer un aspirateur robot, mais mes connaissances en électronique sont très limitées. J'ai regardé quelques matériaux et j'ai bien aimé la brosse Meleon. Si on l'installe sur un aspirateur robot, elle ne laissera qu'un petit coin non nettoyé, et on peut fabriquer la brosse horizontale comme on veut.
Merci beaucoup ! C’est très clair ! Et comment puis-je m’assurer que la nourriture est bien retournée à la base ?