Sådan laver du en robotstøvsuger selv – 2 samlingsidéer
I dagens hurtige livsstil er det ikke altid nemt at holde hjemmet rent. Moderne teknologi kan hjælpe. Robotstøvsugere har eksisteret i over 15 år. De ligner typisk en stor puck, der bevæger sig rundt i rummet efter et forudindstillet mønster eller tilfældigt (indtil den støder ind i noget) og samler snavs. Vi tilbyder to trinvise instruktioner til, hvordan du laver din egen robotstøvsuger.
Materialer til montering
Så for at samle en robotstøvsuger skal du forstå dens komponenter. Lad os gennemgå dem trin for trin. Den skal kunne bevæge sig rundt i rummet på egen hånd, så den har brug for motorer – to til fire, afhængigt af det endelige design – samt muligheden for at skifte rotationsretning og hastighed, hvilket betyder, at du har brug for et motorstyringskort. Hvis du bruger DC-motorer, skal du bruge et kort med fire transistorer (en H-bro).
En hjemmelavet robotstøvsuger skal registrere kollisioner med vægge og møbler. Dette kræver forhindringssensorer og grænseafbrydere på "kofangeren". Det fungerende element - støvsugeren - er også nødvendigt. Det skal være designet til at fungere på lavspændings-jævnstrøm (f.eks. 12V).
Udover en støvsuger skal du bruge en roterende børste, der rengør overfladen, løfter tæppets bunke og fejer snavs væk. Dette kræver en eller to ekstra motorer.
Et system, der styrer alt dette. Den enkleste løsning er et Arduino-board. Ethvert board kan bruges til denne opgave; Nano- eller Pro mini-boards har den rigtige størrelse til jobbet.
Idé nr. 1: En robotstøvsuger lavet af pap
Robottens base er lavet af tykt pap. Det er bedst at lime den sammen i et par lag, hvor fibrene er justeret vinkelret. Til dens tekniske komponenter skal du bruge følgende sæt dele:
- Ethvert Arduino-kort.
- Breadboard eller et simpelt breadboard, i princippet kan du undvære det, bare lod alt.
- 2 ultralydsafstandssensorer (afstandsmåler).
- Støvsugerturbine.
- En lille motor eller køler fra en computer.
- Motorer med gearkasser og hjul.
- Motorstyring.
- Ledninger til kredsløbsforbindelser.
- Batterier og laderegulator.
Robotten kræver tre litiumbatterier for at drive den. Hvert batteri har en spænding på 3,7 V. Der skal bruges en controller til at oplade dem, f.eks. den på billedet:

Controller
For at styre robottens drivmotorer er det praktisk at bruge et modul baseret på en L298-mikrochip. Dette er et H-bro-kredsløb, og du kan bygge det selv fra individuelle komponenter, men det er mere pålideligt at købe et færdiglavet printkort. Det giver dig mulighed for at indstille robotstøvsugerens hastighed og ændre dens retning.

Kontrolmodul
For at regulere hastigheden tilføres et PWM-signal til ENA- eller ENB-pinden, og for at indstille rotationsretningen tilføres modsatte signaler til IN1 og IN2 for den ene motor og IN3 og IN4 for den anden motor. Hvis IN1 har en logisk 1-position og IN2 har en logisk 0-position, roterer motoren i én retning. For at ændre retningen skal du bytte 1-erne om med 0'erne. Den skal samles med en Arduino ved hjælp af følgende diagram (du kan bruge alle pins; du angiver dem på skitsen).

Arduino-kredsløb
Dernæst skal du lave en base af pap og fastgøre hjulene til den. Du burde få noget i retning af dette:

Papbund
Her er en visning nedefra. To drivhjul med en vinkelgearkasse og et styrehjul:

Akselafstand
Nu skal du samle kredsløbet, der skal monteres på basen. Basen skal være cirka 30 cm i diameter for at kunne rumme både elektronikken og selve støvsugerenheden.

Samling af sagen
I stedet for afstandsmålere kan du bruge et kofangermonteret system, der er forbundet med grænseafbrydere. Ved kollision med en forhindring vil styresystemet signalere en retningsændring.

Kofanger
Du kan også selv lave kontaktbumpere. Du skal bruge en tynd, men stiv ledning, f.eks. et parsnoet kabel. For at gøre dette skal du lave en kontaktpude på indersiden af bumperen ved hjælp af folie og fastgøre ledningen som vist nedenfor. Når robotstøvsugeren støder ind i møbler eller vægge, vil de have kontakt. Juster afstanden fra ledningen til folien for at opnå den ønskede følsomhed og forhindre falske alarmer. 5V påføres folien, og ledningen går til Arduino-indgangen, trukket til negativ gennem en modstand på flere kiloohms.

Hjemmelavet kontaktbumper
Enheden drives af batterier; lineære stabilisatorer som f.eks. l7805 kan bruges til at drive styresystemet. En step-down-konverter, f.eks. LM2596, er egnet til at justere motorhastigheden.
Den sværeste del er at designe og samle støvsugeren. Her er en grov tegning:

Støvsugerdiagram
Vi brækker de originale ventilatorblade af og monterer en støvsugerturbine på dens rotor. Det er vigtigt at fastgøre turbinen præcist i midten, ellers skaber man ubalancer og vibrationer.

Robotturbine
Sådan ser bagsiden af turbinen ud, når den er fastgjort til kølerotoren. Den kan fastgøres med varmlim eller superlim.

Udsigt over turbinen indefra
Det er alt, hvad der er til det, en trin-for-trin guide til at samle en robotstøvsuger lavet af skrotmaterialer. Dens driftsalgoritme er som følger: robotstøvsugeren bevæger sig fremad, indtil den støder på en forhindring. Efter kollisionen (eller tilnærmelsen, hvis du bruger ultralydsafstandsmålere), stopper den, bevæger sig bagud en forudbestemt afstand, drejer i en tilfældig vinkel og fortsætter med at bevæge sig.
Idé nr. 2: En næsten fabrikslignende robot
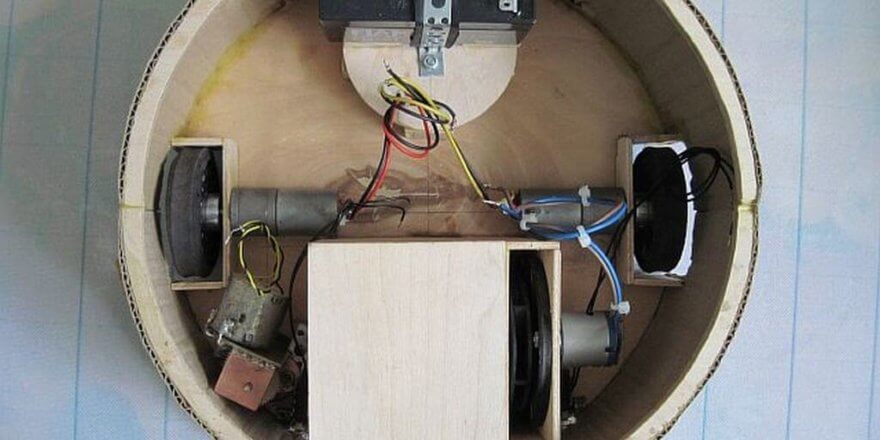
Vi præsenterer et enklere robotstøvsugerprojekt. Sådan ser det ud, når det er samlet:

Hjemmelavet robotstøvsuger
Navigationssystemet er samlet af et sæt af seks IR-forhindringssensorer. Hvis ingen af dem udløses, er der to kontaktsensorer (grænseafbrydere). Motorstyringssystemet bruger den samme driver med en L298N-mikrochip. For at samle det skal du bruge:
- Arduino-kort, oprindeligt Pro-mini, blev brugt.
- En USB-TTL-adapter til programmering af denne Arduino-model. Hvis du bruger en Arduino Nano, behøver du ikke den, da den understøtter programmering via USB.
- Driver til L298N motorer.
- Motorer til hjul med gearkasse.
- 6 IR-sensorer.
- Motorer til turbinen (hvis muligt, kraftigere).
- Støvsugerens turbinehjul.
- Børstemotorer kan være hvad som helst.
- 2 kollisionssensorer.
Saml alt dette efter denne ordning:

Diagram over montering af robotstøvsuger
For at samle strømforsyningskredsløbet til en robotstøvsuger skal du bruge:
- 4 litiumbatterier, 18650-typen, er velegnede.
- 2 DC/DC-konvertere (step-up og step-down).
- En controller til opladning og afladning af to batterier (søg online efter "2s li-ion controller"). Kredsløbet bruger en serieforbindelse af to parallelforbundne celler, hvilket resulterer i en udgangsspænding på over 7,4 V. Parallelkredsløbet bruges til at øge kapaciteten og batteriets levetid.
Her er strømforsyningsdiagrammet til denne robot:

Strømforsyningsdiagram
Derudover skal du bruge plastik (PVC) eller et andet materiale til robotkroppen; du kan udskrive det på en 3D-printer, hvis du har mulighed for det.
Dette gør-det-selv-projekt kræver firmware. Her er et eksempel på en tilfældig rengøringsalgoritme, vi fandt online. Download skitsen her: firmware til en robotstøvsuger.
Denne artikel omhandlede to robotstøvsugerdesigns, som du kan kopiere og bygge selv. Du kan bygge en automatisk rumstøvsuger for mellem $30 og $100. De dyreste komponenter er batterier, motorer og Arduino-kort. Hvis du har bygget en hjemmelavet robotstøvsuger med succes eller er kommet op med et andet design, så del dine eksempler i kommentarerne. Vi byder åben kommunikation velkommen!
Endelig anbefaler vi at se disse videoer, som tydeligt demonstrerer et par flere ideer til at lave en robotstøvsuger derhjemme:








Tak for artiklen!
Til din orientering er "dvigatelya" ikke et ord på russisk.
Men dette er blot en kosmetisk fejl ved varen.)
Hej, jeg hedder Yuri, og jeg er ved at afslutte et byggeprojekt. Der er et hav af støv. Jeg fik ideen til at lave en robotstøvsuger, men jeg ved kun så meget om elektronik, som jeg ville vide i skolen. Jeg kiggede på nogle materialer, og jeg kunne godt lide Meleon-kostebørsten. Hvis man sætter den på en robotstøvsuger, efterlader den et lille hjørne ubehandlet, og den vandrette børste kan laves, præcis som man vil.
Mange tak!!! Det er meget tydeligt! Og hvordan sikrer jeg, at maden bliver returneret til basen?