Cómo hacer un robot aspirador tú mismo: 2 ideas de montaje
Con el ritmo de vida acelerado de hoy, mantener la casa limpia no siempre es fácil. La tecnología moderna puede ayudar. Las aspiradoras robot llevan más de 15 años en el mercado. Suelen parecerse a un disco grande que se mueve por la habitación siguiendo un patrón preestablecido o aleatoriamente (hasta que choca con algo) y recoge residuos. Ofrecemos dos instrucciones paso a paso para que puedas fabricar tu propia aspiradora robot.
Materiales para el montaje
Para ensamblar una aspiradora robot, es necesario comprender sus componentes. Veamos cada uno paso a paso. Necesita moverse por la habitación por sí sola, por lo que necesita motores (de dos a cuatro, según el diseño final), así como la capacidad de cambiar la dirección de rotación y la velocidad, lo que significa que necesita una placa de control de motores. Si usa motores de CC, necesitará una placa con cuatro transistores (un puente H).
Una aspiradora robot casera debe detectar colisiones con paredes y muebles. Esto requiere sensores de obstáculos e interruptores de límite en el parachoques. También se necesita el elemento de trabajo (la aspiradora). Debe estar diseñada para funcionar con corriente continua de bajo voltaje (p. ej., 12 V).
Además de una aspiradora, necesita un cepillo giratorio que limpie la superficie, levante el pelo de la alfombra y barra los residuos. Esto requiere uno o dos motores más.
Un sistema que controlará todo esto. La opción más sencilla es una placa Arduino. Cualquier placa servirá para esta tarea; las placas Nano o Pro mini tienen el tamaño adecuado.
Idea n.° 1: Un robot aspirador hecho de cartón
La base del robot está hecha de cartón grueso. Se recomienda pegarla en un par de capas, con las fibras alineadas perpendicularmente. Para sus componentes técnicos, necesitará el siguiente conjunto de piezas:
- Cualquier placa Arduino.
- Protoboard o placa de pruebas simple, en principio puedes prescindir de ella, simplemente soldar todo.
- 2 sensores de distancia ultrasónicos (telémetro).
- Turbina de aspiradora.
- Un pequeño motor o enfriador de una computadora.
- Motores con reductores y ruedas.
- Controlador del motor.
- Cables para conexiones de circuitos.
- Baterías y controlador de carga.
El robot necesita tres baterías de litio para funcionar. Cada una tiene un voltaje de 3,7 V. Se necesita un controlador para cargarlas, como el de la foto:

Controlador
Para controlar los motores del robot, es conveniente usar un módulo basado en un microchip L298. Se trata de un circuito de puente H, que puedes construir tú mismo con componentes individuales, pero comprar una placa prefabricada es más fiable. Permite ajustar la velocidad del robot aspirador y cambiar su dirección.

Módulo de control
Para regular la velocidad, se aplica una señal PWM al pin ENA o ENB, y para establecer el sentido de rotación, se aplican señales opuestas a IN1 e IN2 para un motor, y a IN3 e IN4 para el otro. Si IN1 está en un 1 lógico e IN2 en un 0 lógico, el motor gira en un sentido. Para cambiar el sentido, se intercambian los 1 por los 0. Debe ensamblarse con un Arduino siguiendo el siguiente diagrama (puede usar cualquier pin; se especifica en el boceto).

Circuito Arduino
A continuación, necesitas hacer una base de cartón y fijarle las ruedas. Debería quedar algo como esto:

Base de cartón
Aquí se ve desde abajo. Dos ruedas motrices con caja de cambios angular y una rueda giratoria.

Distancia entre ejes
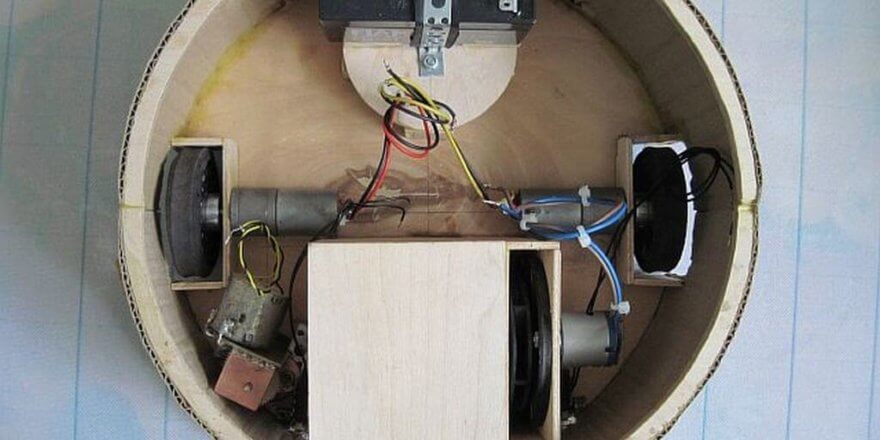
Ahora necesitas ensamblar el circuito que se montará en la base. La base debe tener unos 30 cm de diámetro para acomodar tanto la electrónica como la aspiradora.

Montaje de la caja
En lugar de telémetros, puede usar un sistema montado en el parachoques conectado a interruptores de límite. Al chocar con un obstáculo, el sistema de control indicará un cambio de dirección.

Parachoques
También puedes fabricar parachoques de contacto tú mismo. Necesitarás un cable delgado pero rígido, como un cable de par trenzado. Para ello, crea una almohadilla de contacto en el interior del parachoques con papel de aluminio y fija el cable como se muestra a continuación. Cuando el robot aspirador choque contra muebles o paredes, estos harán contacto. Ajusta la distancia entre el cable y el papel de aluminio para lograr la sensibilidad deseada y evitar falsas alarmas. Se aplican 5 V al papel de aluminio y el cable va a la entrada de Arduino, conectado a negativo mediante una resistencia de varios kiloohmios.

Parachoques de contacto casero
El dispositivo se alimenta mediante baterías; se pueden utilizar estabilizadores lineales como el l7805 para alimentar el sistema de control. Un convertidor reductor, como el LM2596, es adecuado para ajustar la velocidad del motor.
Lo más difícil es diseñar y ensamblar la aspiradora. Aquí tienes un boceto:

Diagrama de aspiradora
Quitamos las aspas originales del ventilador y fijamos una turbina de aspiradora a su rotor. Es importante fijar la turbina con precisión en el centro, ya que de lo contrario se producirán desequilibrios y vibraciones.

turbina robótica
Así se ve la parte trasera de la turbina al conectarla al rotor del enfriador. Se puede fijar con pegamento caliente o superpegamento.

Vista de la turbina desde el interior
Eso es todo: una guía paso a paso para ensamblar un robot aspirador con materiales de desecho. Su algoritmo de funcionamiento es el siguiente: el robot aspirador avanza hasta encontrar un obstáculo. Tras la colisión (o aproximación, si se utilizan telémetros ultrasónicos), se detiene, retrocede una distancia predeterminada, gira en un ángulo aleatorio y continúa su movimiento.
Idea n.° 2: Un robot casi de fábrica
Te presentamos un proyecto de robot aspirador más sencillo. Así luce una vez ensamblado:

Aspiradora robótica casera
El sistema de navegación se compone de un conjunto de seis sensores de obstáculos infrarrojos. Si ninguno se activa, se incluyen dos sensores de contacto (interruptores de límite). El sistema de control del motor utiliza el mismo controlador con un microchip L298N. Para su montaje, necesitará:
- Placa Arduino, originalmente se utilizaba Pro-mini.
- Un adaptador USB-TTL para programar este modelo de Arduino. Si usas un Arduino Nano, no lo necesitarás, ya que admite programación por USB.
- Controlador para motores L298N.
- Motores para ruedas con caja de cambios.
- 6 sensores IR.
- Motores para la turbina (si es posible más potentes).
- Impulsor de turbina de aspiradora.
- Los motores de escobillas pueden ser cualquier cosa.
- 2 sensores de colisión.
Monta todo esto según este esquema:

Diagrama de montaje de una aspiradora robot
Para montar el circuito de alimentación de un robot aspirador necesitarás:
- 4 baterías de litio, tipo 18650 es adecuado.
- 2 convertidores DC/DC (elevador y reductor).
- Un controlador para cargar y descargar dos baterías (busque en línea "controlador de iones de litio 2s"). El circuito utiliza una conexión en serie de dos celdas en paralelo, lo que genera un voltaje de salida superior a 7,4 V. El circuito en paralelo se utiliza para aumentar la capacidad y la duración de la batería.
Aquí está el diagrama de fuente de alimentación para este robot:

Diagrama de fuente de alimentación
Además, necesitarás plástico (PVC) o cualquier otro material para el cuerpo del robot; puedes imprimirlo en una impresora 3D si tienes la oportunidad.
Este proyecto DIY requiere firmware. Aquí tienes un ejemplo de un algoritmo de limpieza aleatorio que encontramos en internet. Descarga el boceto aquí: firmware para un robot aspirador.
Este artículo analiza dos diseños de aspiradoras robot que puedes replicar y construir tú mismo. Puedes construir una aspiradora automática por entre $30 y $100. Los componentes más caros son las baterías, los motores y las placas Arduino. Si has construido con éxito una aspiradora robot casera o has ideado un diseño diferente, comparte tus ejemplos en los comentarios. ¡Agradecemos la comunicación abierta!
Por último, os recomendamos ver estos vídeos, en los que se muestran claramente algunas ideas más para fabricar un robot aspirador en casa:








¡Gracias por el artículo!
Para su información, “dvigatelya” no es una palabra en ruso.
Pero esto es sólo un defecto cosmético del artículo).
Hola, soy Yuri. Estoy terminando un proyecto de construcción. Hay un mar de polvo. Se me ocurrió hacer una aspiradora robot, pero solo sé lo que sabía de electrónica en la escuela. Busqué algunos materiales y me gustó el cepillo de escoba Meleon. Si lo colocas en una aspiradora robot, deja un pequeño rincón sin limpiar. El cepillo horizontal se puede hacer como quieras.
¡Muchas gracias! ¡Está muy claro! ¿Y cómo me aseguro de que la comida regrese a la base?