Kuidas ise robottolmuimejat teha – 2 kokkupaneku ideed
Tänapäeva kiire elutempo juures pole kodu puhtana hoidmine alati lihtne. Kaasaegne tehnoloogia saab aidata. Robottolmuimejaid on olnud juba üle 15 aasta. Tavaliselt meenutavad nad suurt ketast, mis liigub toas ringi vastavalt etteantud mustrile või juhuslikult (kuni millegi vastu põrkab) ja kogub prahti. Pakume kahte samm-sammult juhist, kuidas ise robottolmuimejat valmistada.
Monteerimismaterjalid
Seega, robottolmuimeja kokkupanekuks peate mõistma selle komponente, vaatame need samm-sammult läbi. See peab toas iseseisvalt ringi liikuma, seega vajab see mootoreid – kaks kuni neli, olenevalt lõplikust konstruktsioonist – ning võimalust muuta pöörlemissuunda ja kiirust, mis tähendab, et vajate mootori juhtplaati. Alalisvoolumootorite kasutamisel vajate nelja transistoriga plaati (H-sild).
Kodune robottolmuimeja peab tuvastama kokkupõrkeid seinte ja mööbliga. Selleks on vaja takistusandureid ja piirlüliteid "kaitseraual". Vajalik on ka töötav element – tolmuimeja. See peab olema konstrueeritud töötama madalpinge alalisvoolutoitel (nt 12 V).
Lisaks tolmuimejale vajate pöörlevat harja, mis puhastab pinda, tõstab vaibahunniku üles ja pühib minema prahi. Selleks on vaja veel ühte või kahte mootorit.
Süsteem, mis seda kõike juhib. Lihtsaim variant on Arduino plaat. Selleks ülesandeks sobib ükskõik milline plaat; Nano või Pro mini plaadid on selle töö jaoks õige suurusega.
Idee nr 1: Papist robottolmuimeja
Roboti alus on valmistatud paksust papist. Parim on see kokku liimida paaris kihis, nii et kiud oleksid risti. Selle tehniliste komponentide jaoks vajate järgmist osade komplekti:
- Suvaline Arduino plaat.
- Leivaplaat või lihtne leivaplaat, põhimõtteliselt saab ka ilma hakkama, lihtsalt joota kõik ära.
- 2 ultraheli kauguseandurit (kaugusmõõtja).
- Tolmuimeja turbiin.
- Väike mootor või jahuti arvutist.
- Käigukastide ja ratastega mootorid.
- Mootori kontroller.
- Juhtmed vooluringiühenduste jaoks.
- Patareid ja laadimiskontroller.
Roboti toiteks on vaja kolme liitiumakut. Igaühe pinge on 3,7 V. Nende laadimiseks on vaja kontrollerit, näiteks fotol olevat:

Kontroller
Roboti ajamimootorite juhtimiseks on mugav kasutada L298 mikrokiibile põhinevat moodulit. See on H-silla vooluring ja seda saab ise üksikutest komponentidest kokku panna, kuid valmisplaadi ostmine on usaldusväärsem. See võimaldab teil seadistada robottolmuimeja kiirust ja muuta selle suunda.

Juhtmoodul
Kiiruse reguleerimiseks rakendatakse ENA või ENB tihvtile PWM-signaal ning pöörlemissuuna määramiseks rakendatakse ühe mootori IN1 ja IN2 ning teise mootori IN3 ja IN4 vastassuunalisi signaale. Kui IN1 on loogilisel 1-l ja IN2 loogilisel 0-l, pöörleb mootor ühes suunas. Suuna muutmiseks vahetage 1-d 0-dega. See tuleks kokku panna Arduino abil, kasutades järgmist skeemi (võite kasutada mis tahes tihvte; need määrate te joonisel).

Arduino vooluring
Järgmisena peate papist aluse valmistama ja selle külge rattad kinnitama. Peaksite saama midagi sellist:

Papist alus
Vaade altpoolt. Kaks veoratast nurkkäigukasti ja tugirattaga:

Teljevahe
Nüüd peate kokku panema vooluringi, mis paigaldatakse alusele. Aluse läbimõõt peaks olema umbes 30 cm, et mahutada nii elektroonikat kui ka tolmuimejat ennast.

Korpuse kokkupanek
Kaugusmõõtjate asemel võite kasutada kaitserauale kinnitatud süsteemi, mis on ühendatud piirlülititega. Takistusega kokkupõrkel annab juhtimissüsteem suunamuutusest märku.

Kaitseraud
Kontaktpuhvreid saab ka ise teha. Teil on vaja õhukest, kuid jäika traati, näiteks keerdpaarkaablit. Selleks tehke kaitseraua siseküljele fooliumiga kontaktpadi ja kinnitage traat allpool näidatud viisil. Kui robottolmuimeja põrkab kokku mööbli või seintega, tekivad need kokkupuutes. Soovitud tundlikkuse saavutamiseks ja valehäirete vältimiseks reguleerige juhtme ja fooliumi vahelise kauguse suhet. Fooliumile rakendatakse 5 V ja traat läheb Arduino sisendisse, kus see on mitme kilooomise takisti kaudu negatiivses asendis.

Kodune kontaktkaitseraud
Seade töötab patareidega; juhtimissüsteemi toiteks saab kasutada lineaarseid stabilisaatoreid, näiteks l7805. Mootori kiiruse reguleerimiseks sobib astmeline muundur, näiteks LM2596.
Kõige raskem on tolmuimeja projekteerimine ja kokkupanek. Siin on ligikaudne joonis:

Tolmuimeja diagramm
Me murrame maha originaalventilaatori labad ja kinnitame rootori külge tolmuimeja turbiini. Oluline on turbiin täpselt keskele kinnitada, vastasel juhul tekib tasakaalustamatus ja vibratsioon.

Roboti turbiin
Nii näeb välja turbiini tagaosa, kui see on jahuti rootori külge kinnitatud. Selle saab kinnitada kuumliimi või superliimiga.

Turbiini vaade seestpoolt
See on kõik, mis sellest järeldub – samm-sammult juhend robottolmuimeja kokkupanekuks jääkmaterjalidest. Selle tööalgoritm on järgmine: robottolmuimeja liigub edasi, kuni kohtab takistust. Pärast kokkupõrget (või lähenemist, kui kasutate ultraheli kaugusmõõtjaid) see peatub, liigub etteantud vahemaa võrra tagasi, pöörab end suvalise nurga all ja jätkab liikumist.
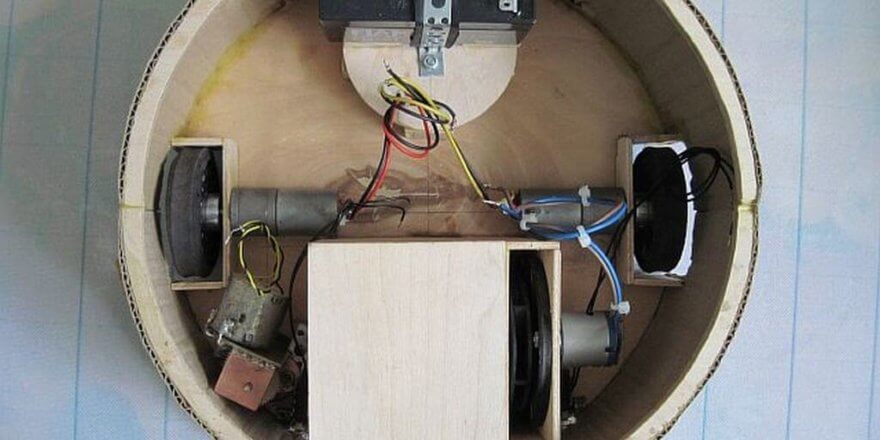
Idee nr 2: Peaaegu tehasesarnane robot
Esitleme teile lihtsamat robottolmuimeja projekti. Kokkupanduna näeb see välja selline:

Kodune robottolmuimeja
Navigatsioonisüsteem on kokku pandud kuuest infrapunatakistuse andurist. Juhul kui ükski neist ei käivitu, on olemas kaks kontaktandurit (piirlülitit). Mootori juhtimissüsteem kasutab sama draiverit L298N mikrokiibiga. Selle kokkupanekuks on vaja:
- Arduino plaat, algselt kasutati Pro-mini.
- USB-TTL adapter selle Arduino mudeli programmeerimiseks. Kui kasutate Arduino Nanot, siis te seda ei vaja, kuna see toetab programmeerimist USB kaudu.
- L298N mootorite draiver.
- Käigukastiga rataste mootorid.
- 6 infrapunasensorit.
- Turbiini mootorid (võimalusel võimsamad).
- Tolmuimeja turbiini tiivik.
- Harjamootorid võivad olla ükskõik millised.
- 2 kokkupõrkeandurit.
Koguge kõik vastavalt sellele skeemile:

Robottolmuimeja kokkupaneku skeem
Robottolmuimeja toiteahela kokkupanekuks vajate:
- 4 liitiumakut, sobib 18650 tüüp.
- 2 alalisvoolu/alalisvoolu muundurit (pinget tõstev ja langetav).
- Kontroller kahe aku laadimiseks ja tühjendamiseks (otsi internetist "2s li-ion controller"). Ahel kasutab kahe paralleelselt ühendatud elemendi jadaühendust, mille tulemuseks on väljundpinge üle 7,4 V. Paralleelahelat kasutatakse aku mahtuvuse ja tööea suurendamiseks.
Siin on selle roboti toiteploki skeem:

Toiteallika skeem
Lisaks vajate roboti kere jaoks plastikut (PVC) või muud materjali; kui teil on selline võimalus, saate selle 3D-printerile printida.
See isetegemise projekt vajab püsivara. Siin on näide juhusliku puhastusalgoritmi kohta, mille leidsime internetist. Laadige eskiis siit alla: robottolmuimeja püsivara.
See artikkel käsitles kahte robottolmuimeja disaini, mida saate ise ehitada ja kopeerida. Automaatse toapuhasti saate ehitada 30–100 dollari eest. Kõige kallimad komponendid on akud, mootorid ja Arduino plaadid. Kui olete edukalt ise robottolmuimeja ehitanud või välja mõelnud teistsuguse disaini, jagage oma näiteid kommentaarides. Me tervitame avatud suhtlust!
Lõpuks soovitame vaadata neid videoid, mis näitavad selgelt veel mõnda ideed robottolmuimeja valmistamiseks kodus:








Tänan artikli eest!
Teie teadmiseks, „dvigatelja” ei ole vene keeles sõna.
Aga see on vaid artikli kosmeetiline defekt.)
Tere, mina olen Yuri ja lõpetan ehitusprojekti. Seal on tolmumeri. Mul oli idee teha robottolmuimeja, aga elektroonikast tean vaid nii palju kui koolis. Vaatasin mõningaid materjale ja mulle meeldis Meleoni harjas. Kui see robottolmuimejale panna, jääb väike nurk puhastamata ja horisontaalse harja saab teha kuidas iganes.
Suur aitäh!!! See on väga selge! Ja kuidas ma saan tagada, et toit baasi tagasi toimetatakse?