Kuinka tehdä robotti-imuri itse – 2 kokoamisvinkkiä
Nykypäivän nopeatempoisessa elämäntyylissä kodin pitäminen puhtaana ei ole aina helppoa. Nykyaikainen teknologia voi auttaa. Robotti-imureita on ollut olemassa yli 15 vuotta. Ne muistuttavat tyypillisesti suurta kiekkoa, joka liikkuu huoneessa ennalta määrätyn kuvion mukaan tai satunnaisesti (kunnes se törmää johonkin) ja kerää roskia. Tarjoamme kaksi vaiheittaista ohjetta oman robotti-imurin tekemiseen.
Kokoonpanomateriaalit
Joten robotti-imurin kokoamiseksi sinun on ymmärrettävä sen osat, käydään ne läpi askel askeleelta. Sen on liikuttava huoneessa itsenäisesti, joten se tarvitsee moottoreita – kahdesta neljään lopullisesta suunnittelusta riippuen – sekä kyvyn vaihtaa pyörimissuuntaa ja nopeutta, mikä tarkoittaa, että tarvitset moottorin ohjauskortin. Jos käytät tasavirtamoottoreita, tarvitset kortin, jossa on neljä transistoria (H-silta).
Kotitekoisen robotti-imurin on havaittava törmäykset seiniin ja huonekaluihin. Tämä vaatii estetunnistimia ja rajakytkimiä "puskurissa". Myös työelementti – pölynimuri – on tarpeen. Sen on oltava suunniteltu toimimaan matalajännitteisellä tasavirralla (esim. 12 V).
Pölynimurin lisäksi tarvitset pyörivän harjan, joka puhdistaa pinnan, nostaa maton kasan ja lakaisee roskat pois. Tämä vaatii yhden tai kaksi moottoria lisää.
Järjestelmä, joka ohjaa kaikkea tätä. Yksinkertaisin vaihtoehto on Arduino-kortti. Mikä tahansa kortti käy tähän tehtävään; Nano- tai Pro mini -kortit ovat oikean kokoisia tähän työhön.
Idea nro 1: Pahvista valmistettu robotti-imuri
Robotin pohja on tehty paksusta pahvista. Se on parasta liimata yhteen muutamaksi kerrokseksi, kuidut kohtisuorassa. Teknisten osien osalta tarvitset seuraavat osat:
- Mikä tahansa Arduino-levy.
- Leipälauta tai yksinkertainen leipälauta, periaatteessa voit tehdä ilman sitä, juota vain kaikki.
- 2 ultraäänietäisyysanturia (etäisyysmittari).
- Pölynimurin turbiini.
- Pieni moottori tai jäähdytin tietokoneesta.
- Moottorit vaihteistoilla ja pyörillä.
- Moottorin ohjain.
- Johdot piiriliitäntöjä varten.
- Akut ja lataussäädin.
Robotti tarvitsee virtansa kolmella litiumparistolla. Kunkin jännite on 3,7 V. Niiden lataamiseen tarvitaan ohjain, kuten kuvassa oleva:

Ohjain
Robotin käyttömoottoreiden ohjaamiseen on kätevää käyttää L298-mikropiiriin perustuvaa moduulia. Tämä on H-siltapiiri, ja voit rakentaa sen itse yksittäisistä komponenteista, mutta valmiin piirilevyn ostaminen on luotettavampaa. Sen avulla voit asettaa robotti-imurin nopeuden ja muuttaa sen suuntaa.

Ohjausmoduuli
Nopeuden säätämiseksi PWM-signaali syötetään ENA- tai ENB-nastaan, ja pyörimissuunnan asettamiseksi vastakkaiset signaalit syötetään toisen moottorin IN1- ja IN2-nastoihin ja toisen moottorin IN3- ja IN4-nastoihin. Jos IN1 on loogisessa tilassa 1 ja IN2 loogisessa tilassa 0, moottori pyörii yhteen suuntaan. Suunnan muuttamiseksi vaihda ykköset nollilla. Se tulee koota Arduinolla seuraavan kaavion mukaisesti (voit käyttää mitä tahansa nastoja; määrittelet ne luonnoksessa).

Arduino-piiri
Seuraavaksi sinun on tehtävä pahvista pohja ja kiinnitettävä siihen pyörät. Sinun pitäisi saada jotain tällaista:

Pahvipohja
Tässä on näkymä alhaalta. Kaksi vetopyörää kulmavaihteistolla ja kääntyvällä pyörällä:

Akseliväli
Nyt sinun on koottava piiri, joka asennetaan alustaan. Alustan halkaisijan tulisi olla noin 30 cm, jotta sekä elektroniikka että itse pölynimuriyksikkö mahtuvat siihen.

Kotelon kokoaminen
Etäisyysmittareiden sijaan voit käyttää puskuriin asennettua järjestelmää, joka on kytketty rajakytkimiin. Törmätessään esteeseen ohjausjärjestelmä ilmoittaa suunnanmuutoksesta.

Puskuri
Voit tehdä kontaktipuskureita myös itse. Tarvitset ohuen mutta jäykän langan, kuten kierretyn parikaapelin. Tee tämä tekemällä kontaktipinta puskurin sisäpuolelle foliolla ja kiinnittämällä lanka alla olevan kuvan mukaisesti. Kun robottipölynimuri törmää huonekaluihin tai seiniin, ne osuvat toisiinsa. Säädä langan etäisyyttä kalvoon halutun herkkyyden saavuttamiseksi ja väärien hälytysten estämiseksi. Kalvoon syötetään 5 V, ja lanka menee Arduino-tuloon, jossa se vedetään negatiiviseen napaan muutaman kilo-ohmin vastuksen kautta.

Kotitekoinen kosketuspuskuri
Laite toimii paristoilla; lineaarisia stabilisaattoreita, kuten l7805, voidaan käyttää ohjausjärjestelmän virransyöttöön. Alennettu muunnin, kuten LM2596, soveltuu moottorin nopeuden säätöön.
Vaikein osa on pölynimurin suunnittelu ja kokoaminen. Tässä on karkea piirustus:

Pölynimurin kaavio
Katkaisemme alkuperäiset tuulettimen siivet ja kiinnitämme pölynimurin turbiinin sen roottoriin. On tärkeää kiinnittää turbiini tarkasti keskelle, muuten syntyy epätasapainoa ja tärinää.

Robottiturbiini
Näin turbiinin takaosa näyttää kiinnitettynä jäähdyttimen roottoriin. Se voidaan kiinnittää kuumaliimalla tai pikaliimalla.

Turbiinin sisänäkymä
Siinä kaikki, vaiheittainen opas robotti-imurin kokoamiseen romumateriaaleista. Sen toiminta-algoritmi on seuraava: robotti-imuri liikkuu eteenpäin, kunnes se kohtaa esteen. Törmäyksen (tai lähestymisen, jos käytät ultraäänietäisyysmittareita) jälkeen se pysähtyy, liikkuu taaksepäin ennalta määrätyn matkan, kääntyy satunnaisessa kulmassa ja jatkaa liikkumista.
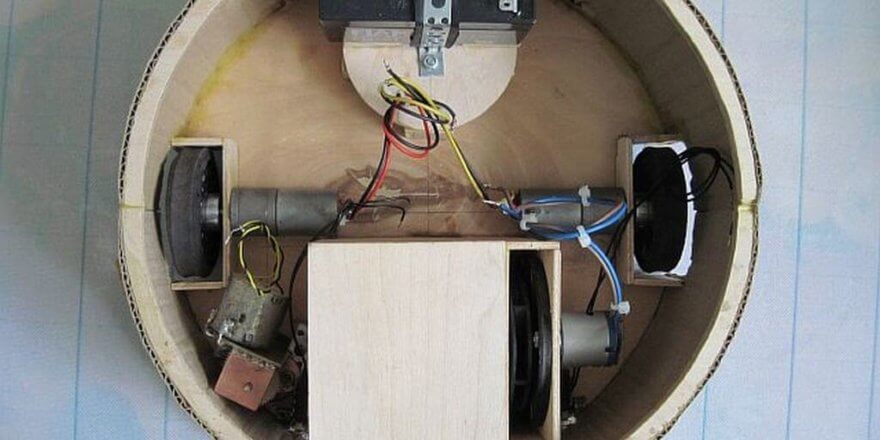
Idea nro 2: Lähes tehdasmainen robotti
Esittelemme teille yksinkertaisemman robottipölynimuriprojektin. Näin se näyttää koottuna:

Kotitekoinen robotti-imuri
Navigointijärjestelmä kootaan kuuden infrapunaesteanturin sarjasta. Jos mikään niistä ei laukea, järjestelmä käyttää kahta kosketusanturia (rajakytkintä). Moottorinohjausjärjestelmä käyttää samaa ajuria L298N-mikropiirillä. Kokoamiseen tarvitset:
- Arduino-levyä, alun perin Pro-miniä, käytettiin.
- USB-TTL-sovitin tämän Arduino-mallin ohjelmointiin. Jos käytät Arduino Nanoa, et tarvitse sitä, koska se tukee ohjelmointia USB:n kautta.
- L298N-moottoreiden ajuri.
- Vaihteistolla varustettujen pyörien moottorit.
- 6 infrapunasensoria.
- Turbiinin moottorit (jos mahdollista, tehokkaammat).
- Pölynimurin turbiinin siipipyörä.
- Harjamoottorit voivat olla mitä tahansa.
- 2 törmäysanturia.
Kokoa kaikki tämän järjestelmän mukaan:

Robotti-imurin kokoonpanokaavio
Robotti-imurin virtalähdepiirin kokoamiseen tarvitset:
- 4 litiumparistoa, 18650-tyyppi sopii.
- 2 DC/DC-muunninta (ylös- ja alasjännitemuunnin).
- Ohjain kahden akun lataamiseen ja purkamiseen (hae verkosta "2s li-ion controller"). Piiri käyttää kahden rinnankytketyn kennon sarjakytkentää, jolloin lähtöjännite on yli 7,4 V. Rinnakkaispiiriä käytetään akun kapasiteetin ja käyttöiän lisäämiseen.
Tässä on robotin virtalähdekaavio:

Virtalähdekaavio
Lisäksi tarvitset muovia (PVC) tai mitä tahansa muuta materiaalia robotin runkoon; voit tulostaa sen 3D-tulostimelle, jos sinulla on tällainen mahdollisuus.
Tämä tee-se-itse-projekti vaatii laiteohjelmiston. Tässä on esimerkki satunnaisesta puhdistusalgoritmista, jonka löysimme verkosta. Lataa luonnos täältä: robotti-imurin laiteohjelmisto.
Tässä artikkelissa käsiteltiin kahta robottipölynimurin mallia, jotka voit kopioida ja rakentaa itse. Voit rakentaa automaattisen huonepuhdistimen 30–100 dollarilla. Kalleimmat komponentit ovat akut, moottorit ja Arduino-levyt. Jos olet onnistuneesti rakentanut itse tehdyn robottipölynimurin tai keksinyt toisenlaisen mallin, jaa esimerkkisi kommenteissa. Avoin viestintä on tervetullutta!
Lopuksi suosittelemme katsomaan näitä videoita, jotka osoittavat selvästi muutamia ideoita robottipölynimurin tekemiseen kotona:








Kiitos artikkelista!
Tiedoksi, ”dvigatelja” ei ole venäjän kielen sana.
Mutta tämä on vain artikkelin kosmeettinen vika.)
Hei, olen Yuri ja olen viimeistelemässä rakennusprojektia. Ilmassa on pölymeri. Minulla oli idea tehdä robottipölynimuri, mutta elektroniikasta tiedän vain sen verran kuin koulussa. Katselin joitakin materiaaleja ja pidin Meleonin harjasta. Jos sen laittaa robottipölynimuriin, se jättää pienen nurkan puhdistamatta, ja vaakasuoran harjan voi tehdä haluamallaan tavalla.
Kiitos paljon!!! Tämä on täysin selvää! Ja miten varmistan, että ruoka palautetaan tukikohtaan?