Hogyan készítsünk saját kezűleg robotporszívót – 2 összeszerelési ötlet
A mai rohanó életstílusban nem mindig könnyű tisztán tartani otthonunkat. A modern technológia segíthet. A robotporszívók már több mint 15 éve léteznek. Általában egy nagy korongra hasonlítanak, amely egy előre beállított minta szerint vagy véletlenszerűen (amíg valaminek neki nem ütközik) mozog a szobában, és összegyűjti a törmeléket. Két lépésről lépésre bemutatjuk, hogyan készítheti el saját robotporszívóját.
Összeszerelési anyagok
Tehát egy robotporszívó összeszereléséhez meg kell értened az alkatrészeit, nézzük meg őket lépésről lépésre. Magától kell mozognia a szobában, tehát motorokra van szüksége – kettőtől négyig, a végső kialakítástól függően –, valamint képesnek kell lennie a forgásirány és a sebesség megváltoztatására, ami azt jelenti, hogy szükséged van egy motorvezérlő panelre. Ha egyenáramú motorokat használsz, akkor egy négy tranzisztoros panelre (egy H-hídra) lesz szükséged.
Egy házilag készített robotporszívónak érzékelnie kell a falakkal és bútorokkal való ütközéseket. Ehhez akadályérzékelőkre és végálláskapcsolókra van szükség a "lökhárítón". A működő elemre – magára a porszívóra – is szükség van. Úgy kell tervezni, hogy alacsony feszültségű egyenárammal (pl. 12 V) működjön.
A porszívó mellett szükséged van egy forgókefére is, amely megtisztítja a felületet, felemeli a szőnyeg bolyhait és elsöpri a törmeléket. Ehhez még egy vagy két motorra van szükség.
Egy rendszer, ami mindezt vezérli. A legegyszerűbb megoldás egy Arduino kártya. Bármelyik kártya megteszi ezt a feladatot; a Nano vagy a Pro mini kártyái a megfelelő méretűek a feladathoz.
1. ötlet: Kartonból készült robotporszívó
A robot alapja vastag kartonból készült. A legjobb, ha néhány rétegben ragasztod össze, a szálakat merőlegesen igazítva. A technikai alkatrészekhez a következő alkatrészekre lesz szükséged:
- Bármely Arduino kártya.
- Kenyérdeszka vagy egy egyszerű kenyérdeszka, elvileg nélkülözheted, csak forraszts mindent.
- 2 ultrahangos távolságérzékelő (távolságmérő).
- Porszívó turbina.
- Egy kis motor vagy hűtő egy számítógépből.
- Motorok sebességváltókkal és kerekekkel.
- Motorvezérlő.
- Vezetékek az áramköri csatlakozásokhoz.
- Akkumulátorok és töltésvezérlő.
A robot működtetéséhez három lítium akkumulátorra van szükség. Mindegyik feszültsége 3,7 V. Töltésükhöz egy vezérlőre van szükség, például a képen láthatóhoz:

vezérlő
A robot meghajtómotorjainak vezérléséhez célszerű egy L298 mikrochipre épülő modult használni. Ez egy H-híd áramkör, és egyedi alkatrészekből saját kezűleg is megépíthető, de egy kész panel vásárlása megbízhatóbb. Lehetővé teszi a robotporszívó sebességének beállítását és irányának megváltoztatását.

Vezérlőmodul
A sebesség szabályozásához egy PWM jelet adunk az ENA vagy ENB lábra, a forgásirány beállításához pedig ellentétes jeleket adunk az IN1 és IN2 bemenetekre az egyik motor, illetve az IN3 és IN4 bemenetekre a másik motor esetében. Ha az IN1 logikai 1-en, az IN2 pedig logikai 0-n van, akkor a motor az egyik irányba forog. Az irány megváltoztatásához cseréljük fel az 1-eseket a 0-kkal. Az alábbi ábra szerint kell összeszerelni egy Arduino-val (bármilyen lábat használhatunk; azokat a vázlaton adjuk meg).

Arduino áramkör
Ezután kartonból kell készíteni egy alapot, és ehhez kell rögzíteni a kerekeket. Valami ilyesmit kell kapnod:

Karton alap
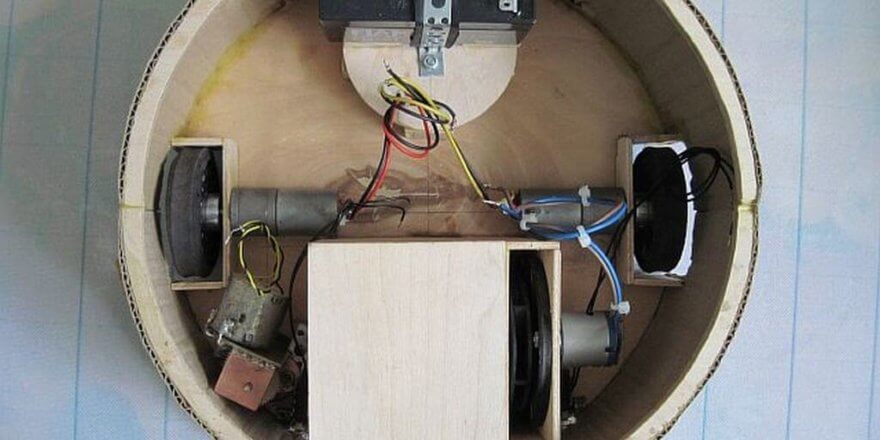
Íme egy alulnézet. Két hajtókerék szögletes sebességváltóval és egy önbeálló kerékkel:

Tengelytávolság
Most össze kell szerelni az alapra szerelendő áramkört. Az alapnak körülbelül 30 cm átmérőjűnek kell lennie, hogy elférjen rajta az elektronika és maga a porszívóegység is.

A tok összeszerelése
Távolságmérők helyett használhat lökhárítóra szerelt rendszert, amely végálláskapcsolókhoz van csatlakoztatva. Akadálynak ütközés esetén a vezérlőrendszer jelzi az irányváltást.

Lökhárító
Érintkezővédőket magad is készíthetsz. Szükséged lesz egy vékony, de merev huzalra, például sodrott érpáras kábelre. Ehhez fóliával alakíts ki egy érintkezőfelületet a védőréteg belsejében, és rögzítsd a vezetéket az alábbiak szerint. Amikor a robotporszívó bútoroknak vagy falaknak ütközik, azok érintkezni fognak. Állítsd be a vezeték és a fólia közötti távolságot a kívánt érzékenység eléréséhez és a téves riasztások elkerüléséhez. A fóliára 5 V feszültséget kapcsolunk, és a vezeték az Arduino bemenetére megy, ahol egy néhány kiloohmos ellenálláson keresztül negatív pólusra húzzuk.

Házi készítésű érintkező lökhárító
A készüléket akkumulátorok táplálják; a vezérlőrendszer táplálására lineáris stabilizátorok, például az l7805 használhatók. A motor fordulatszámának beállítására egy feszültségcsökkentő átalakító, például az LM2596 alkalmas.
A legnehezebb rész a porszívó megtervezése és összeszerelése. Íme egy vázlatos rajz:

Porszívó ábra
Letörjük az eredeti ventilátorlapátokat, és egy porszívó turbinát rögzítünk a rotorjához. Fontos, hogy a turbina pontosan középen legyen rögzítve, különben kiegyensúlyozatlanságot és rezgéseket okozunk.

Robot turbina
Így néz ki a turbina hátulja, miután a hűtőrotorhoz rögzítettük. Rögzíthető forró ragasztóval vagy pillanatragasztóval.

A turbina belülről
Ennyi lenne az egész, egy lépésről lépésre útmutató egy hulladékanyagokból készült robotporszívó összeszereléséhez. A működési algoritmusa a következő: a robotporszívó előre mozog, amíg akadályba nem ütközik. Az ütközés (vagy megközelítés, ha ultrahangos távolságmérőt használ) után megáll, egy előre meghatározott távolságot hátramegy, véletlenszerű szögben megfordul, majd továbbmegy.
2. ötlet: Egy szinte gyárszerű robot
Bemutatunk egy egyszerűbb robotporszívó projektet. Így néz ki összeszerelve:

Házi készítésű robotporszívó
A navigációs rendszer hat infravörös akadályérzékelőből áll. Abban az esetben, ha egyik sem aktiválódik, két érintkezőérzékelő (végálláskapcsoló) van felszerelve. A motorvezérlő rendszer ugyanazt a meghajtót használja egy L298N mikrochippel. Az összeszereléshez a következőkre lesz szüksége:
- Arduino kártyát, eredetileg Pro-mini-t használtak.
- Egy USB-TTL adapter ehhez az Arduino modellhez. Ha Arduino Nanót használsz, akkor nincs rá szükséged, mivel támogatja az USB-n keresztüli programozást.
- L298N motorokhoz való meghajtóprogram.
- Motorok sebességváltóval ellátott kerekekhez.
- 6 infravörös érzékelő.
- Turbinamotorok (ha lehetséges, erősebbek).
- Porszívó turbina járókerék
- A kefés motorok bármi lehetnek.
- 2 ütközésérzékelő.
Szerelje össze mindezt a séma szerint:

Robot porszívó összeszerelési rajz
A robotporszívó tápegységének összeszereléséhez a következőkre lesz szüksége:
- 4 db lítium elem, 18650 típusú, megfelelő.
- 2 DC/DC átalakító (feszültségnövelő és feszültségcsökkentő).
- Vezérlő két akkumulátor töltésére és kisütésére (keressen rá online a „2s li-ion vezérlő” kifejezésre). Az áramkör két párhuzamosan kapcsolt cella soros kapcsolását használja, ami 7,4 V-nál nagyobb kimeneti feszültséget eredményez. A párhuzamos áramkör a kapacitás és az akkumulátor élettartamának növelésére szolgál.
Itt van a robot tápegységének diagramja:

Tápegység diagram
Ezenkívül műanyagra (PVC) vagy bármilyen más anyagra lesz szükséged a robot testéhez, ha van ilyen lehetőséged, kinyomtathatod 3D nyomtatón.
Ehhez a barkács projekthez firmware szükséges. Íme egy példa egy véletlenszerű tisztító algoritmusra, amit online találtunk. Töltsd le a vázlatot itt: firmware robotporszívóhoz.
Ez a cikk két robotporszívó-dizájnt tárgyalt, amelyeket te magad is lemásolhatsz és megépíthetsz. Egy automata szobatisztítót 30 és 100 dollár közötti összegből építhetsz. A legdrágább alkatrészek az akkumulátorok, a motorok és az Arduino táblák. Ha sikeresen építettél házilag robotporszívót, vagy egy másik dizájnnal állsz elő, kérjük, oszd meg a példáidat a hozzászólásokban. Örömmel fogadjuk a nyílt kommunikációt!
Végül javasoljuk, hogy nézd meg ezeket a videókat, amelyek világosan bemutatnak néhány további ötletet a robotporszívó otthoni elkészítéséhez:








Köszönöm a cikket!
Tájékoztatásul közöljük, hogy a „dvigatelja” nem létezik orosz szó.
De ez csak a cikk kozmetikai hibája.)
Sziasztok, Yuri vagyok, egy építési projektet fejezek be, tele van porral. Az volt az ötletem, hogy csináljak egy robotporszívót, de az elektronikáról csak annyit tudok, mint az iskolában. Megnéztem pár anyagot, megtetszett a Meleon seprűkefe, ha felteszed egy robotporszívóra, egy kis sarkot tisztítatlanul hagy, a vízszintes kefét pedig bármilyen módon elkészítheted.
Nagyon szépen köszönöm!!! Ez teljesen világos! És hogyan biztosíthatom, hogy az étel visszakerüljön a bázisra?