Come costruire un robot aspirapolvere fai da te: 2 idee di assemblaggio
Con lo stile di vita frenetico di oggi, mantenere la casa pulita non è sempre facile. La tecnologia moderna può essere d'aiuto. Gli aspirapolvere robot sono in circolazione da oltre 15 anni. In genere assomigliano a un grande disco che si muove nella stanza secondo uno schema predefinito o in modo casuale (finché non urta qualcosa) e raccoglie i detriti. Offriamo due istruzioni passo passo su come realizzare il tuo aspirapolvere robot.
Materiali per il montaggio
Quindi, per assemblare un robot aspirapolvere, è necessario comprenderne i componenti, e li esaminiamo passo dopo passo. Deve muoversi autonomamente nella stanza, quindi ha bisogno di motori – da due a quattro, a seconda del progetto finale – e della possibilità di cambiare direzione di rotazione e velocità, il che significa che è necessaria una scheda di controllo motore. Se si utilizzano motori a corrente continua, è necessaria una scheda con quattro transistor (un ponte H).
Un robot aspirapolvere fatto in casa deve rilevare le collisioni con pareti e mobili. Ciò richiede sensori di ostacolo e finecorsa sul "paraurti". È necessario anche l'elemento di lavoro, ovvero l'aspirapolvere. Deve essere progettato per funzionare con alimentazione a bassa tensione continua (ad esempio, 12 V).
Oltre all'aspirapolvere, è necessaria una spazzola rotante che pulisca la superficie, sollevi il pelo del tappeto e spazzi via i detriti. Questo richiede uno o due motori in più.
Un sistema che controllerà tutto questo. L'opzione più semplice è una scheda Arduino. Qualsiasi scheda andrà bene per questo compito; le schede Nano o Pro mini hanno le dimensioni giuste.
Idea n. 1: Un robot aspirapolvere fatto di cartone
La base del robot è realizzata in cartone spesso. È consigliabile incollarla in più strati, con le fibre allineate perpendicolarmente. Per i componenti tecnici, avrai bisogno del seguente set di parti:
- Qualsiasi scheda Arduino.
- Breadboard o semplice breadboard, in linea di principio puoi farne a meno, basta saldare tutto.
- 2 sensori di distanza a ultrasuoni (telemetro).
- Turbina dell'aspirapolvere.
- Un piccolo motore o un dispositivo di raffreddamento di un computer.
- Motori con riduttori e ruote.
- Controllore del motore.
- Fili per i collegamenti dei circuiti.
- Batterie e regolatore di carica.
Il robot necessita di tre batterie al litio per essere alimentato. Ciascuna ha una tensione di 3,7 V. Per caricarle è necessario un controller, come quello nella foto:

Controllore
Per controllare i motori di azionamento del robot, è conveniente utilizzare un modulo basato su un microchip L298. Si tratta di un circuito a ponte H, che è possibile costruire autonomamente partendo da singoli componenti, ma acquistare una scheda già pronta è più affidabile. Permette di impostare la velocità del robot aspirapolvere e di modificarne la direzione.

Modulo di controllo
Per regolare la velocità, un segnale PWM viene applicato al pin ENA o ENB, mentre per impostare il senso di rotazione, segnali opposti vengono applicati a IN1 e IN2 per un motore e a IN3 e IN4 per l'altro motore. Se IN1 è a 1 logico e IN2 a 0 logico, il motore ruota in una direzione. Per cambiare il senso di rotazione, scambiare gli 1 con gli 0. Il motore deve essere assemblato con un Arduino seguendo lo schema seguente (è possibile utilizzare qualsiasi pin, specificandolo nello sketch).

Circuito Arduino
Successivamente, devi realizzare una base di cartone e fissarci le ruote. Dovresti ottenere qualcosa di simile a questo:

Base in cartone
Ecco una vista dal basso. Due ruote motrici con riduttore angolare e una ruota sterzante:

Passo
Ora è necessario assemblare il circuito che verrà montato sulla base. La base dovrebbe avere un diametro di circa 30 cm per ospitare sia l'elettronica che l'aspirapolvere stesso.

Assemblaggio della cassa
Al posto dei telemetri, è possibile utilizzare un sistema montato sul paraurti e collegato a finecorsa. In caso di collisione con un ostacolo, il sistema di controllo segnalerà un cambio di direzione.

Paraurti
È anche possibile realizzare autonomamente i paraurti di contatto. Avrai bisogno di un filo sottile ma rigido, come un doppino intrecciato. Per farlo, crea una piazzola di contatto all'interno del paraurti usando un foglio di alluminio e fissa il filo come mostrato di seguito. Quando il robot aspirapolvere entra in contatto con mobili o pareti, si creerà un contatto. Regola la distanza tra il filo e il foglio di alluminio per ottenere la sensibilità desiderata ed evitare falsi allarmi. Applica 5 V al foglio di alluminio e il filo va all'ingresso di Arduino, portato a negativo tramite una resistenza di diversi kiloohm.

Paraurti di contatto fatto in casa
Il dispositivo è alimentato a batterie; per alimentare il sistema di controllo è possibile utilizzare stabilizzatori lineari come l'l7805. Per regolare la velocità del motore è adatto un convertitore step-down, come l'LM2596.
La parte più difficile è progettare e assemblare l'aspirapolvere. Ecco uno schizzo:

Schema dell'aspirapolvere
Stacchiamo le pale originali del ventilatore e fissiamo una turbina per aspirapolvere al suo rotore. È importante fissare la turbina con precisione al centro, altrimenti si creeranno squilibri e vibrazioni.

Turbina robotica
Ecco come appare la parte posteriore della turbina quando è fissata al rotore di raffreddamento. Può essere fissata con colla a caldo o supercolla.

Vista della turbina dall'interno
Ecco tutto, una guida passo passo per assemblare un robot aspirapolvere realizzato con materiali di scarto. Il suo algoritmo di funzionamento è il seguente: il robot aspirapolvere avanza finché non incontra un ostacolo. Dopo la collisione (o l'avvicinamento, se si utilizzano telemetri a ultrasuoni), si ferma, arretra di una distanza predeterminata, gira con un'angolazione casuale e continua a muoversi.
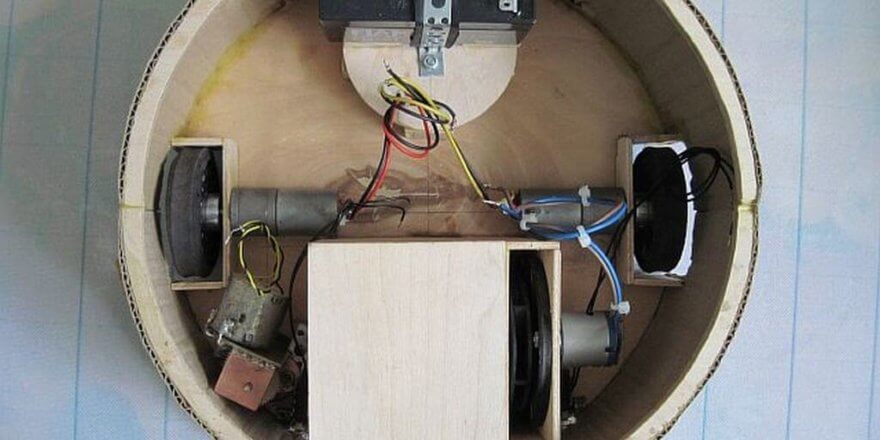
Idea n. 2: Un robot quasi da fabbrica
Vi presentiamo un progetto di robot aspirapolvere più semplice. Ecco come appare una volta assemblato:

Aspirapolvere robotico fatto in casa
Il sistema di navigazione è composto da un set di sei sensori di ostacoli a infrarossi. Nel caso in cui nessuno di essi venga attivato, sono previsti due sensori di contatto (finecorsa). Il sistema di controllo del motore utilizza lo stesso driver con un microchip L298N. Per assemblarlo, sono necessari:
- In origine veniva utilizzata la scheda Arduino Pro-mini.
- Un adattatore USB-TTL per programmare questo modello di Arduino. Se utilizzi un Arduino Nano, non ne avrai bisogno, poiché supporta la programmazione tramite USB.
- Driver per motori L298N.
- Motori per ruote con riduttore.
- 6 sensori IR.
- Motori per la turbina (se possibile, più potenti).
- Girante della turbina dell'aspirapolvere.
- I motori a spazzole possono essere di qualsiasi tipo.
- 2 sensori di collisione.
Assembla tutto questo secondo questo schema:

Schema di montaggio dell'aspirapolvere robot
Per assemblare il circuito di alimentazione di un robot aspirapolvere avrai bisogno di:
- Sono adatte 4 batterie al litio, tipo 18650.
- 2 convertitori CC/CC (step-up e step-down).
- Un controller per la carica e la scarica di due batterie (cerca online "2s li-ion controller"). Il circuito utilizza un collegamento in serie di due celle collegate in parallelo, con una tensione di uscita superiore a 7,4 V. Il circuito in parallelo viene utilizzato per aumentare la capacità e la durata della batteria.
Ecco lo schema di alimentazione di questo robot:

Schema di alimentazione
Inoltre, per il corpo del robot avrai bisogno di plastica (PVC) o di qualsiasi altro materiale; se ne hai la possibilità, puoi stamparlo con una stampante 3D.
Questo progetto fai da te richiede un firmware. Ecco un esempio di algoritmo di pulizia casuale che abbiamo trovato online. Scarica lo sketch qui: firmware per un robot aspirapolvere.
Questo articolo ha esaminato due progetti di robot aspirapolvere che puoi replicare e costruire da solo. Puoi costruire un robot aspirapolvere automatico per stanze con un budget compreso tra 30 e 100 dollari. I componenti più costosi sono le batterie, i motori e le schede Arduino. Se hai costruito con successo un robot aspirapolvere fatto in casa o hai ideato un progetto diverso, condividi i tuoi esempi nei commenti. Apprezziamo la comunicazione aperta!
Infine, ti consigliamo di guardare questi video, che mostrano chiaramente altre idee per realizzare un robot aspirapolvere in casa:








Grazie per l'articolo!
Per vostra informazione, “dvigatelya” non è una parola russa.
Ma questo è solo un difetto estetico dell'articolo.)
Ciao, sono Yuri, sto finendo un progetto di costruzione, c'è un mare di polvere, ho avuto l'idea di costruire un robot aspirapolvere, ma di elettronica ne so solo quanto a scuola. Ho guardato alcuni materiali, mi è piaciuta la spazzola Meleon, se la metti su un robot aspirapolvere, lascerà un piccolo angolo non pulito, e la spazzola orizzontale può essere realizzata come preferisci.
Grazie mille!!! È chiarissimo! E come faccio ad assicurarmi che il cibo venga restituito alla base?