איך להכין שואב אבק רובוטי בעצמך - 2 רעיונות להרכבה
באורח החיים המהיר של ימינו, שמירה על ניקיון הבית לא תמיד קלה. טכנולוגיה מודרנית יכולה לעזור. שואבי אבק רובוטיים קיימים כבר למעלה מ-15 שנה. הם בדרך כלל דומים לדסקית גדולה שנעה בחדר לפי דפוס קבוע מראש או באופן אקראי (עד שהיא נתקלת במשהו) ואוספת פסולת. אנו מציעים שתי הוראות שלב אחר שלב כיצד להכין שואב אבק רובוטי משלכם.
חומרים להרכבה
אז, כדי להרכיב שואב אבק רובוטי, עליכם להבין את רכיביו, בואו נעבור עליהם שלב אחר שלב. הוא צריך לנוע ברחבי החדר בכוחות עצמו, ולכן הוא זקוק למנועים - שניים עד ארבעה, תלוי בעיצוב הסופי - כמו גם ליכולת לשנות את כיוון הסיבוב והמהירות, מה שאומר שאתם צריכים לוח בקרת מנוע. אם אתם משתמשים במנועי DC, תצטרכו לוח עם ארבעה טרנזיסטורים (גשר H).
שואב אבק רובוטי תוצרת בית חייב לזהות התנגשויות עם קירות ורהיטים. לשם כך נדרשים חיישני מכשולים ומתגי גבול על ה"פגוש". גם רכיב העבודה - שואב האבק - נחוץ. הוא חייב להיות מתוכנן לפעול על מתח ישר נמוך (למשל, 12V).
בנוסף לשואב אבק, אתם זקוקים למברשת מסתובבת שתנקה את המשטח, תרים את ערימת השטיח ותטאטא פסולת. זה דורש עוד מנוע אחד או שניים.
מערכת שתשלוט בכל זה. האפשרות הפשוטה ביותר היא לוח ארדואינו. כל לוח יתאים למשימה זו; לוחות הננו או הפרו מיני הם בגודל המתאים למשימה.
רעיון מספר 1: שואב אבק רובוטי עשוי מקרטון
בסיס הרובוט עשוי מקרטון עבה. עדיף להדביק אותו יחד בכמה שכבות, כאשר הסיבים מיושרים בניצב. עבור הרכיבים הטכניים שלו, תזדקקו לסט החלקים הבא:
- כל לוח ארדואינו.
- קרש לחם או קרש לחם פשוט, באופן עקרוני אפשר להסתדר בלעדיו, פשוט להלחים הכל.
- 2 חיישני מרחק אולטרסאונד (מד טווח).
- טורבינה של שואב אבק.
- מנוע קטן או מקרר ממחשב.
- מנועים עם תיבות הילוכים וגלגלים.
- בקר מנוע.
- חוטים לחיבורי מעגלים.
- סוללות ובקר טעינה.
הרובוט זקוק לשלוש סוללות ליתיום כדי להפעיל אותו. לכל אחת מהן מתח של 3.7 וולט. נדרש בקר כדי לטעון אותן, כמו זה שבתמונה:

בַּקָר
כדי לשלוט במנועי ההנעה של הרובוט, נוח להשתמש במודול המבוסס על שבב L298. זהו מעגל גשר H, וניתן לבנות אותו בעצמך מרכיבים בודדים, אך קניית לוח מוכן אמינה יותר. הוא מאפשר לך לכוון את מהירות שואב האבק הרובוטי ולשנות את כיוון השאיבה שלו.

מודול בקרה
כדי לווסת את המהירות, אות PWM מופעל לפיני ENA או ENB, וכדי לקבוע את כיוון הסיבוב, אותות מנוגדים מופעלים ל-IN1 ול-IN2 עבור מנוע אחד ול-IN3 ול-IN4 עבור המנוע השני. אם IN1 נמצא במצב לוגי 1 ו-IN2 במצב לוגי 0, המנוע מסתובב בכיוון אחד. כדי לשנות את הכיוון, החליפו את ה-1s ב-0s. יש להרכיב אותו עם ארדואינו באמצעות התרשים הבא (ניתן להשתמש בכל פינים; יש לציין אותם בסקיצה).

מעגל ארדואינו
בשלב הבא, עליכם להכין בסיס מקרטון ולחבר אליו את הגלגלים. עליכם לקבל משהו כזה:

בסיס קרטון
הנה מבט מלמטה. שני גלגלי הנעה עם תיבת הילוכים זוויתית וגלגל גלגל:

בסיס גלגלים
כעת עליכם להרכיב את המעגל החשמלי שיותקן על הבסיס. קוטר הבסיס צריך להיות כ-30 ס"מ כדי להכיל גם את האלקטרוניקה וגם את יחידת שואב האבק עצמה.

הרכבת המארז
במקום מדי טווח, ניתן להשתמש במערכת המותקנת על הפגוש המחוברת למתגי גבול. במקרה של התנגשות במכשול, מערכת הבקרה תאותת על שינוי כיוון.

פָּגוֹשׁ
ניתן גם להכין פגושי מגע בעצמכם. תצטרכו חוט דק אך קשיח, כגון כבל זוג שזור. לשם כך, צרו משטח מגע בחלק הפנימי של הפגוש באמצעות נייר כסף ואבטחו את החוט כפי שמוצג למטה. כאשר שואב האבק הרובוטי יתנגש ברהיטים או בקירות, הם ייצרו מגע. התאימו את המרחק מהחוט לרדיד הכסף כדי להשיג את הרגישות הרצויה ולמנוע אזעקות שווא. מתח של 5 וולט מופעל על נייר הכסף, והחוט עובר לכניסת הארדואינו, נמשך לשלילי דרך נגד של כמה קילו-אוהם.

פגוש מגע תוצרת בית
המכשיר מופעל על ידי סוללות; ניתן להשתמש במייצבים ליניאריים כגון l7805 כדי להפעיל את מערכת הבקרה. ממיר מוריד מתח, כגון LM2596, מתאים להתאמת מהירות המנוע.
החלק הקשה ביותר הוא תכנון והרכבת שואב האבק. הנה שרטוט גס:

דיאגרמת שואב אבק
אנו שוברים את להבי המאוורר המקוריים ומחברים טורבינה של שואב אבק לרוטור שלה. חשוב לאבטח את הטורבינה בדיוק במרכז, אחרת תיווצרו חוסר איזון ורעידות.

טורבינת רובוט
כך נראה גב הטורבינה כשהיא מחוברת לרוטור המצנן. ניתן לחבר אותה באמצעות דבק חם או דבק-על.

מבט על הטורבינה מבפנים
זה כל מה שיש, מדריך שלב אחר שלב להרכבת שואב אבק רובוטי העשוי מחומרי גרוטאות. אלגוריתם הפעולה שלו הוא כדלקמן: שואב האבק הרובוטי נע קדימה עד שהוא נתקל במכשול. לאחר ההתנגשות (או ההתקרבות, אם אתם משתמשים במד טווח קולי), הוא עוצר, נע אחורה מרחק קבוע מראש, מסתובב בזווית אקראית וממשיך לנוע.
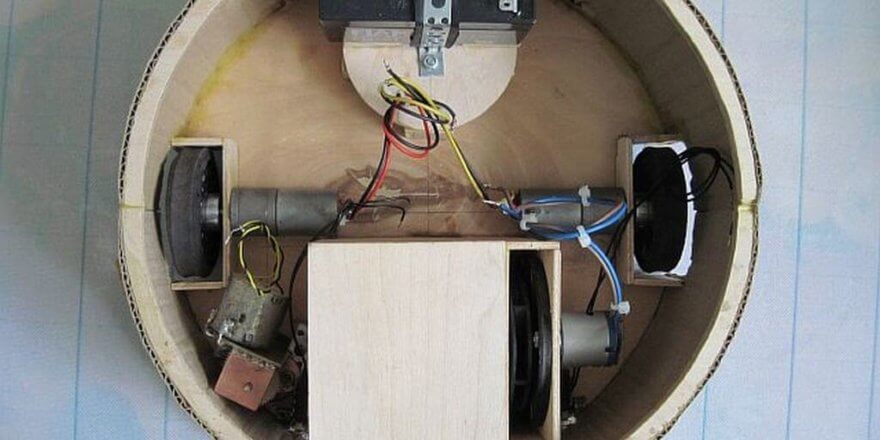
רעיון מס' 2: רובוט כמעט כמו במפעל
אנו מציגים בפניכם פרויקט פשוט יותר של שואב אבק רובוטי. כך הוא נראה לאחר הרכבה:

שואב אבק רובוטי ביתי
מערכת הניווט מורכבת מסט של שישה חיישני מכשולים אינפרא-אדומים. במקרה שאף אחד מהם לא מופעל, מסופקים שני חיישני מגע (מתגי גבול). מערכת בקרת המנוע משתמשת באותו דרייבר עם שבב מיקרו L298N. כדי להרכיב אותה, תצטרכו:
- לוח ארדואינו, במקור Pro-mini שימש.
- מתאם USB-TTL לתכנות דגם ארדואינו זה. אם אתם משתמשים בארדואינו ננו, לא תצטרכו אותו, מכיוון שהוא תומך בתכנות דרך USB.
- דרייבר למנועים L298N.
- מנועים לגלגלים עם תיבת הילוכים.
- 6 חיישני אינפרא אדום.
- מנועים לטורבינה (אם אפשר, חזקים יותר).
- אימפלר טורבינה של שואב אבק.
- מנועי מברשות יכולים להיות כל דבר.
- 2 חיישני התנגשות.
הרכב את כל זה לפי התוכנית הזו:

תרשים הרכבת שואב האבק הרובוטי
כדי להרכיב את מעגל אספקת החשמל של שואב אבק רובוטי תצטרכו:
- 4 סוללות ליתיום, סוג 18650 מתאימות.
- 2 ממירי DC/DC (עליית מתח והורדת מתח).
- בקר לטעינה ופריקה של שתי סוללות (חפשו באינטרנט "2s li-ion controller"). המעגל משתמש בחיבור טורי של שני תאים המחוברים במקביל, וכתוצאה מכך נוצר מתח יציאה גדול מ-7.4 וולט. המעגל המקביל משמש להגדלת הקיבולת וחיי הסוללה.
הנה תרשים ספק הכוח עבור הרובוט הזה:

דיאגרמת ספק הכוח
בנוסף, תצטרכו פלסטיק (PVC) או כל חומר אחר לגוף הרובוט; תוכלו להדפיס אותו במדפסת תלת מימד אם יש לכם הזדמנות כזו.
פרויקט "עשה זאת בעצמך" הזה דורש קושחה. הנה דוגמה לאלגוריתם ניקוי אקראי שמצאנו באינטרנט. הורידו את הסקיצה כאן: קושחה לשואב אבק רובוטי.
מאמר זה דן בשני עיצובים של שואבי אבק רובוטיים שתוכלו לשכפל ולבנות בעצמכם. ניתן לבנות שואב אבק אוטומטי לחדרים במחיר של בין 30 ל-100 דולר. הרכיבים היקרים ביותר הם הסוללות, המנועים ולוחות הארדואינו. אם בניתם בהצלחה שואב אבק רובוטי ביתי או הגעתם לעיצוב אחר, אנא שתפו את הדוגמאות שלכם בתגובות. נשמח לקבל תקשורת פתוחה!
לבסוף, אנו ממליצים לצפות בסרטונים הבאים, המדגימים בבירור עוד כמה רעיונות להכנת שואב אבק רובוטי בבית:








תודה על המאמר!
לידיעתך, "dvigatelya" אינה מילה ברוסית.
אבל זה רק פגם קוסמטי של המאמר.)
היי, אני יורי, אני מסיים פרויקט בנייה, יש ים של אבק, היה לי רעיון לבנות שואב אבק רובוטי, אבל אני יודע על אלקטרוניקה רק כמה שאני יודע בבית הספר. בדקתי כמה חומרים, אהבתי את מברשת המטאטא של Meleon, אם תשימו אותה על שואב אבק רובוטי, היא תשאיר פינה קטנה לא נקייה, ואת המברשת האופקית אפשר לבנות איך שתרצו.
תודה רבה!!! זה ברור לגמרי! ואיך אני מוודא שהאוכל יוחזר לבסיס?