Hoe maak je zelf een robotstofzuiger? – 2 ideeën voor de montage
In de snelle levensstijl van tegenwoordig is het niet altijd even makkelijk om je huis schoon te houden. Moderne technologie kan daarbij helpen. Robotstofzuigers bestaan al meer dan 15 jaar. Ze lijken meestal op een grote schijf die door de kamer beweegt volgens een vooraf ingesteld patroon of willekeurig (totdat hij ergens tegenaan botst) en vuil opzuigt. We bieden twee stapsgewijze instructies voor het maken van je eigen robotstofzuiger.
Materialen voor de montage
Om een robotstofzuiger in elkaar te zetten, moet je de onderdelen ervan begrijpen. Laten we ze stap voor stap doornemen. De robot moet zelfstandig door de kamer kunnen bewegen, dus heeft hij motoren nodig – twee tot vier, afhankelijk van het uiteindelijke ontwerp – en de mogelijkheid om de draairichting en snelheid te wijzigen. Dit betekent dat je een motorbesturingskaart nodig hebt. Als je gelijkstroommotoren gebruikt, heb je een kaart nodig met vier transistoren (een H-brug).
Een zelfgemaakte robotstofzuiger moet botsingen met muren en meubels detecteren. Dit vereist obstakelsensoren en eindschakelaars op de bumper. Ook het werkende onderdeel – de stofzuiger – is nodig. Deze moet ontworpen zijn om te werken op laagspanning gelijkstroom (bijvoorbeeld 12V).
Naast een stofzuiger heb je een roterende borstel nodig die het oppervlak reinigt, de pool van het tapijt optilt en vuil wegveegt. Hiervoor zijn één of twee extra motoren nodig.
Een systeem dat dit alles aanstuurt. De eenvoudigste optie is een Arduino-bord. Elk bord is geschikt voor deze taak; de Nano of Pro mini-borden hebben het juiste formaat.
Idee #1: Een robotstofzuiger gemaakt van karton.
De basis van de robot is gemaakt van dik karton. Je kunt hem het beste in meerdere lagen lijmen, waarbij de vezels loodrecht op elkaar staan. Voor de technische onderdelen heb je de volgende onderdelen nodig:
- Elk Arduino-bord.
- Een breadboard of een eenvoudig breadboard is in principe ook prima; je kunt het ook gewoon weglaten en alles solderen.
- 2 ultrasone afstandssensoren (afstandsmeter).
- Stofzuigerturbine.
- Een kleine motor of koeler uit een computer.
- Motoren met versnellingsbakken en wielen.
- Motorcontroller.
- Draden voor circuitverbindingen.
- Batterijen en laadregelaar.
De robot heeft drie lithiumbatterijen nodig om te functioneren. Elke batterij heeft een spanning van 3,7 V. Om ze op te laden is een controller nodig, zoals die op de foto:

Controller
Om de aandrijfmotoren van de robot te besturen, is het handig om een module te gebruiken die gebaseerd is op een L298-microchip. Dit is een H-brugschakeling, die je zelf kunt bouwen met losse componenten, maar een kant-en-klaar printplaatje is betrouwbaarder. Hiermee kun je de snelheid van de robotstofzuiger instellen en de richting ervan veranderen.

Besturingsmodule
Om de snelheid te regelen, wordt een PWM-signaal aangelegd op de ENA- of ENB-pin. Om de draairichting in te stellen, worden tegengestelde signalen aangelegd op IN1 en IN2 voor de ene motor en op IN3 en IN4 voor de andere motor. Als IN1 een logische 1 is en IN2 een logische 0, draait de motor in één richting. Om de draairichting te veranderen, verwissel je de 1'en met de 0'en. De module moet worden aangesloten op een Arduino volgens het onderstaande schema (je kunt elke gewenste pin gebruiken; je specificeert deze in de sketch).

Arduino-circuit
Vervolgens moet je een basis van karton maken en daar de wielen aan bevestigen. Het resultaat zou er ongeveer zo uit moeten zien:

Kartonnen basis
Hier is een zicht vanaf de onderkant. Twee aandrijfwielen met een haakse overbrenging en een zwenkwiel:

Wielbasis
Nu moet je het circuit in elkaar zetten dat op de basis gemonteerd wordt. De basis moet een diameter van ongeveer 30 cm hebben om zowel de elektronica als de stofzuiger zelf te kunnen plaatsen.

Het samenstellen van de koffer
In plaats van afstandmeters kunt u een op de bumper gemonteerd systeem gebruiken dat is aangesloten op eindschakelaars. Bij een aanrijding met een obstakel geeft het besturingssysteem een signaal voor een koerswijziging.

Bumper
Je kunt ook zelf contactbumpers maken. Je hebt hiervoor een dunne maar stevige draad nodig, zoals een getwist paar kabel. Maak hiervoor een contactvlak aan de binnenkant van de bumper met behulp van folie en bevestig de draad zoals hieronder weergegeven. Wanneer de robotstofzuiger tegen meubels of muren botst, maken ze contact. Stel de afstand tussen de draad en de folie in om de gewenste gevoeligheid te bereiken en valse alarmen te voorkomen. Er wordt 5V op de folie aangelegd en de draad gaat naar de Arduino-ingang, die via een weerstand van enkele kilo-ohm naar de minpool wordt getrokken.

Zelfgemaakte contactbumper
Het apparaat wordt gevoed door batterijen; lineaire stabilisatoren zoals de L7805 kunnen worden gebruikt om het besturingssysteem van stroom te voorzien. Een step-down converter, zoals de LM2596, is geschikt voor het regelen van de motorsnelheid.
Het lastigste is het ontwerpen en in elkaar zetten van de stofzuiger. Hier is een schets:

Diagram van een stofzuiger
We breken de originele ventilatorbladen af en bevestigen een turbine van een stofzuiger aan de rotor. Het is belangrijk om de turbine precies in het midden te bevestigen, anders ontstaan er onevenwichtigheden en trillingen.

Robotturbine
Zo ziet de achterkant van de turbine eruit wanneer deze aan de koelrotor is bevestigd. Hij kan worden vastgezet met hete lijm of secondelijm.

Zicht op de turbine vanuit de binnenkant
Dat is alles, een stapsgewijze handleiding voor het in elkaar zetten van een robotstofzuiger van restmaterialen. Het werkingsalgoritme is als volgt: de robotstofzuiger beweegt vooruit totdat hij een obstakel tegenkomt. Na de botsing (of nadering, als je ultrasone afstandssensoren gebruikt) stopt hij, beweegt een vooraf bepaalde afstand achteruit, draait onder een willekeurige hoek en beweegt verder.
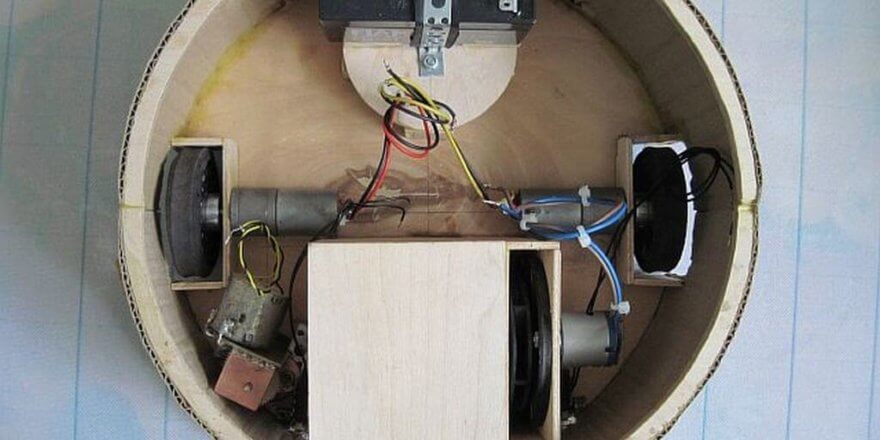
Idee #2: Een robot die bijna op een fabriek lijkt.
We presenteren u een eenvoudiger robotstofzuigerproject. Zo ziet het eruit als het in elkaar is gezet:

zelfgemaakte robotstofzuiger
Het navigatiesysteem is opgebouwd uit zes infrarood obstakelsensoren. Als geen van deze sensoren een obstakel detecteert, zijn er twee contactsensoren (eindschakelaars) aanwezig. Het motorbesturingssysteem maakt gebruik van dezelfde driver met een L298N-microchip. Voor de montage heb je het volgende nodig:
- Oorspronkelijk werd een Arduino Pro-mini gebruikt.
- Een USB-TTL-adapter voor het programmeren van dit Arduino-model. Als je een Arduino Nano gebruikt, heb je deze niet nodig, aangezien die programmeren via USB ondersteunt.
- Aansturing voor L298N-motoren.
- Motoren voor wielen met versnellingsbak.
- 6 IR-sensoren.
- Motoren voor de turbine (indien mogelijk, krachtigere motoren).
- Stofzuiger turbine waaier.
- Borstelmotoren kunnen van alles zijn.
- 2 botsingssensoren.
Stel dit alles samen volgens dit schema:

Montageschema van een robotstofzuiger
Om het voedingscircuit van een robotstofzuiger in elkaar te zetten, heb je het volgende nodig:
- 4 lithiumbatterijen van het type 18650 zijn geschikt.
- 2 DC/DC-omvormers (opwaarts en omlaag).
- Een controller voor het laden en ontladen van twee batterijen (zoek online naar "2s li-ion controller"). Het circuit maakt gebruik van een serieschakeling van twee parallel geschakelde cellen, wat resulteert in een uitgangsspanning van meer dan 7,4 V. De parallelschakeling wordt gebruikt om de capaciteit en de levensduur van de batterij te vergroten.
Hier is het voedingsschema voor deze robot:

Voedingsschema
Daarnaast heb je plastic (PVC) of een ander materiaal nodig voor de behuizing van de robot; je kunt deze printen met een 3D-printer als je die mogelijkheid hebt.
Voor dit doe-het-zelfproject is firmware nodig. Hier is een voorbeeld van een willekeurig reinigingsalgoritme dat we online hebben gevonden. Download de sketch hier: firmware voor een robotstofzuiger.
In dit artikel werden twee ontwerpen voor robotstofzuigers besproken die je zelf kunt nabouwen. Je kunt een automatische kamerreiniger bouwen voor tussen de $30 en $100. De duurste onderdelen zijn de batterijen, motoren en Arduino-boards. Als je met succes een zelfgemaakte robotstofzuiger hebt gebouwd of een ander ontwerp hebt bedacht, deel je voorbeelden dan in de reacties. We stellen open communicatie op prijs!
Tot slot raden we aan om deze video's te bekijken, die duidelijk een aantal ideeën laten zien voor het zelf maken van een robotstofzuiger:








Bedankt voor het artikel!
Ter informatie: "dvigatelya" is geen Russisch woord.
Maar dit is slechts een cosmetisch defect aan het artikel.)
Hallo, ik ben Yuri. Ik ben bezig met de afronding van een bouwproject en er ligt een enorme stofwolk. Ik kreeg het idee om een robotstofzuiger te maken, maar mijn kennis van elektronica is beperkt tot wat ik op school heb geleerd. Ik heb wat materialen bekeken en de bezemborstel van Meleon sprak me wel aan. Als je die op een robotstofzuiger zet, blijft er ook in kleine hoekjes schoon. Bovendien kun je de horizontale borstel in elke gewenste vorm maken.
Hartelijk bedankt!!! Dat is heel duidelijk! En hoe zorg ik ervoor dat het eten weer teruggebracht wordt naar de basis?