Slik lager du en robotstøvsuger selv – 2 monteringsideer
I dagens hektiske livsstil er det ikke alltid like lett å holde hjemmet rent. Moderne teknologi kan hjelpe. Robotstøvsugere har eksistert i over 15 år. De ligner vanligvis en stor puck som beveger seg rundt i rommet i henhold til et forhåndsinnstilt mønster eller tilfeldig (til den støter borti noe) og samler rusk. Vi tilbyr to trinnvise instruksjoner om hvordan du lager din egen robotstøvsuger.
Materialer for montering
Så, for å sette sammen en robotstøvsuger, må du forstå komponentene. La oss gå gjennom dem trinn for trinn. Den må kunne bevege seg rundt i rommet på egenhånd, så den trenger motorer – to til fire, avhengig av den endelige designen – samt muligheten til å endre rotasjonsretning og hastighet, noe som betyr at du trenger et motorstyringskort. Hvis du bruker likestrømsmotorer, trenger du et kort med fire transistorer (en H-bro).
En hjemmelaget robotstøvsuger må oppdage kollisjoner med vegger og møbler. Dette krever hindringssensorer og grensebrytere på «støtfangeren». Arbeidselementet – støvsugeren – er også nødvendig. Det må være konstruert for å fungere på lavspent likestrøm (f.eks. 12 V).
I tillegg til en støvsuger trenger du en roterende børste som rengjør overflaten, løfter teppehaugen og feier bort rusk. Dette krever én eller to motorer til.
Et system som vil kontrollere alt dette. Det enkleste alternativet er et Arduino-kort. Ethvert kort vil fungere for denne oppgaven; Nano- eller Pro mini-kortene har riktig størrelse for jobben.
Idé nr. 1: En robotstøvsuger laget av papp
Robotens base er laget av tykk papp. Det er best å lime den sammen i et par lag, med fibrene vinkelrett på hverandre. Til de tekniske komponentene trenger du følgende sett med deler:
- Hvilket som helst Arduino-kort.
- Brødbrett eller et enkelt brødbrett, i prinsippet kan du klare deg uten, bare lodd alt.
- 2 ultralydavstandssensorer (avstandsmåler).
- Støvsugerturbin.
- En liten motor eller kjøler fra en datamaskin.
- Motorer med girkasser og hjul.
- Motorstyring.
- Ledninger for kretstilkoblinger.
- Batterier og ladekontroller.
Roboten trenger tre litiumbatterier for å drive den. Hvert har en spenning på 3,7 V. En kontroller er nødvendig for å lade dem, slik som den på bildet:

Kontroller
For å styre robotens drivmotorer er det praktisk å bruke en modul basert på en L298-mikrobrikke. Dette er en H-brokrets, og du kan bygge den selv fra individuelle komponenter, men det er mer pålitelig å kjøpe et ferdiglaget kort. Det lar deg stille inn robotstøvsugeren sin hastighet og endre retning.

Kontrollmodul
For å regulere hastigheten tilføres et PWM-signal til ENA- eller ENB-pinnen, og for å stille inn rotasjonsretningen tilføres motsatte signaler til IN1 og IN2 for den ene motoren og IN3 og IN4 for den andre motoren. Hvis IN1 har logisk 1 og IN2 har logisk 0, roterer motoren i én retning. For å endre retning, bytt enerne med nullene. Den skal monteres med en Arduino ved hjelp av følgende diagram (du kan bruke hvilke som helst pinner; du spesifiserer dem i skissen).

Arduino-krets
Deretter må du lage en base av papp og feste hjulene til den. Du bør få noe slikt:

Pappbunn
Her er en visning nedenfra. To drivhjul med vinkelgirkasse og et svinghjul:

Akselavstand
Nå må du sette sammen kretsen som skal monteres på basen. Basen bør være omtrent 30 cm i diameter for å få plass til både elektronikken og selve støvsugerenheten.

Montering av saken
I stedet for avstandsmålere kan du bruke et støtfangermontert system koblet til grensebrytere. Ved kollisjon med en hindring vil kontrollsystemet signalisere en retningsendring.

Støtfanger
Du kan også lage kontaktstøtfangere selv. Du trenger en tynn, men stiv ledning, for eksempel en tvunnet parkabel. For å gjøre dette, lag en kontaktflate på innsiden av støtfangeren ved hjelp av folie og fest ledningen som vist nedenfor. Når robotstøvsugeren kolliderer med møbler eller vegger, vil de få kontakt. Juster avstanden fra ledningen til folien for å oppnå ønsket følsomhet og forhindre falske alarmer. 5 V påføres folien, og ledningen går til Arduino-inngangen, trukket til negativ gjennom en motstand på flere kiloohms.

Hjemmelaget kontaktstøtfanger
Enheten drives av batterier; lineære stabilisatorer som l7805 kan brukes til å drive kontrollsystemet. En nedstrømsomformer, som LM2596, er egnet for å justere motorhastigheten.
Den vanskeligste delen er å designe og montere støvsugeren. Her er en grov tegning:

Støvsugerdiagram
Vi brekker av de originale viftebladene og fester en støvsugerturbin til rotoren. Det er viktig å feste turbinen nøyaktig i midten, ellers vil du skape ubalanser og vibrasjoner.

Robotturbin
Slik ser baksiden av turbinen ut når den er festet til kjølerrotoren. Den kan festes med varmt lim eller superlim.

Utsikt over turbinen fra innsiden
Det er alt som er å si, en trinnvis veiledning for å sette sammen en robotstøvsuger laget av skrapmaterialer. Driftsalgoritmen er som følger: robotstøvsugeren beveger seg fremover til den møter en hindring. Etter kollisjonen (eller tilnærmingen, hvis du bruker ultralydavstandsmålere), stopper den, beveger seg bakover en forhåndsbestemt avstand, snur i en tilfeldig vinkel og fortsetter å bevege seg.
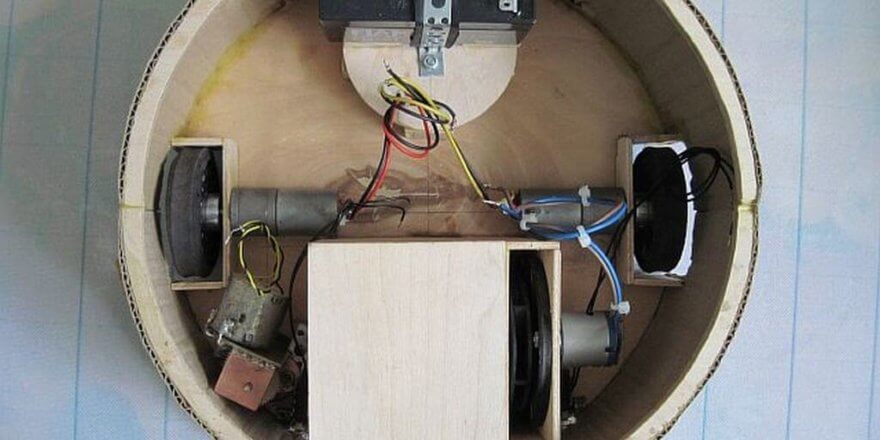
Idé nr. 2: En nesten fabrikklignende robot
Vi presenterer et enklere robotstøvsugerprosjekt. Slik ser det ut når det er montert:

Hjemmelaget robotstøvsuger
Navigasjonssystemet er satt sammen av et sett med seks IR-hindringssensorer. Hvis ingen av dem utløses, er det to kontaktsensorer (grensebrytere). Motorstyringssystemet bruker den samme driveren med en L298N-mikrobrikke. For å sette det sammen trenger du:
- Arduino-kort, opprinnelig Pro-mini, ble brukt.
- En USB-TTL-adapter for programmering av denne Arduino-modellen. Hvis du bruker en Arduino Nano, trenger du ikke den, da den støtter programmering via USB.
- Driver for L298N-motorer.
- Motorer for hjul med girkasse.
- 6 IR-sensorer.
- Motorer for turbinen (hvis mulig, kraftigere).
- Støvsugerens turbinimpeller.
- Børstemotorer kan være hva som helst.
- 2 kollisjonssensorer.
Sett sammen alt dette i henhold til denne ordningen:

Monteringsdiagram for robotstøvsugere
For å sette sammen strømforsyningskretsen til en robotstøvsuger trenger du:
- 4 litiumbatterier, 18650-typen, er egnet.
- 2 DC/DC-omformere (step-up og step-down).
- En kontroller for lading og utlading av to batterier (søk på nettet etter «2s li-ion controller»). Kretsen bruker en seriekobling av to parallellkoblede celler, noe som resulterer i en utgangsspenning større enn 7,4 V. Parallellkretsen brukes til å øke kapasiteten og batteriets levetid.
Her er strømforsyningsdiagrammet for denne roboten:

Strømforsyningsdiagram
I tillegg trenger du plast (PVC) eller annet materiale til robotkroppen; du kan skrive det ut på en 3D-printer hvis du har muligheten.
Dette gjør-det-selv-prosjektet krever firmware. Her er et eksempel på en tilfeldig rengjøringsalgoritme vi fant på nettet. Last ned skissen her: firmware for en robotstøvsuger.
Denne artikkelen diskuterte to robotstøvsugerdesign som du kan kopiere og bygge selv. Du kan bygge en automatisk romstøvsuger for mellom $30 og $100. De dyreste komponentene er batterier, motorer og Arduino-kort. Hvis du har bygget en hjemmelaget robotstøvsuger eller kommet opp med et annet design, kan du dele eksemplene dine i kommentarfeltet. Vi ønsker åpen kommunikasjon velkommen!
Til slutt anbefaler vi å se disse videoene, som tydelig demonstrerer noen flere ideer for å lage en robotstøvsuger hjemme:








Takk for artikkelen!
Til din informasjon, «dvigatelya» er ikke et ord på russisk.
Men dette er bare en kosmetisk feil ved artikkelen.)
Hei, jeg heter Yuri. Jeg holder på å fullføre et byggeprosjekt. Det er et hav av støv. Jeg hadde ideen om å lage en robotstøvsuger, men jeg kan bare så mye om elektronikk som jeg ville gjort på skolen. Jeg så på noen materialer, og jeg likte Meleon-kostebørsten. Hvis du setter den på en robotstøvsuger, vil den etterlate et lite hjørne som ikke er rengjort, og den horisontale børsten kan lages akkurat slik du vil.
Tusen takk!!! Det er helt klart! Og hvordan sørger jeg for at maten blir returnert til basen?