Kako narediti robotski sesalnik – 2 ideji za sestavljanje
V današnjem hitrem življenjskem slogu vzdrževanje čistoče doma ni vedno enostavno. Pri tem lahko pomaga sodobna tehnologija. Robotski sesalniki obstajajo že več kot 15 let. Običajno so podobni velikemu ploščku, ki se premika po prostoru po vnaprej določenem vzorcu ali naključno (dokler ne trči v nekaj) in zbira odpadke. Ponujamo vam dva navodila po korakih, kako izdelati svoj robotski sesalnik.
Materiali za montažo
Torej, za sestavljanje robotskega sesalnika morate razumeti njegove komponente, ki si jih bomo ogledali korak za korakom. Samostojno se mora premikati po prostoru, zato potrebuje motorje – od dva do štiri, odvisno od končne zasnove – ter možnost preklapljanja smeri vrtenja in hitrosti, kar pomeni, da potrebujete krmilno ploščo motorja. Če uporabljate enosmerne motorje, boste potrebovali ploščo s štirimi tranzistorji (H-mostiček).
Doma narejen robotski sesalnik mora zaznati trke s stenami in pohištvom. Za to so potrebni senzorji ovir in končna stikala na "odbijaču". Potreben je tudi delovni element – sesalnik. Zasnovan mora biti za delovanje na nizkonapetostni enosmerni tok (npr. 12 V).
Poleg sesalnika potrebujete tudi vrtljivo krtačo, ki bo očistila površino, dvignila vlakna preproge in pometla umazanijo. Za to sta potrebna še en ali dva motorja.
Sistem, ki bo vse to nadzoroval. Najenostavnejša možnost je plošča Arduino. Za to nalogo bo zadostovala katera koli plošča; plošči Nano ali Pro mini sta prave velikosti za to delo.
Ideja št. 1: Robotski sesalnik iz kartona
Osnova robota je izdelana iz debelega kartona. Najbolje ga je zlepiti v nekaj plasteh, pri čemer so vlakna poravnana pravokotno. Za tehnične komponente boste potrebovali naslednji komplet delov:
- Vsaka Arduino plošča.
- Plošča za rezanje ali preprosta plošča za rezanje, načeloma lahko brez nje, samo spajkajte vse.
- 2 ultrazvočna senzorja razdalje (daljinomer).
- Turbina sesalnika.
- Majhen motor ali hladilnik iz računalnika.
- Motorji z menjalniki in kolesi.
- Krmilnik motorja.
- Žice za povezave tokokrogov.
- Baterije in regulator polnjenja.
Robot za napajanje potrebuje tri litijeve baterije. Vsaka ima napetost 3,7 V. Za njihovo polnjenje je potreben krmilnik, kot je tisti na sliki:

Krmilnik
Za krmiljenje pogonskih motorjev robota je priročno uporabiti modul, ki temelji na mikročipu L298. To je vezje H-mostička, ki ga lahko sestavite sami iz posameznih komponent, vendar je nakup že izdelane plošče zanesljivejši. Omogoča vam nastavitev hitrosti robotskega sesalnika in spreminjanje njegove smeri.

Krmilni modul
Za regulacijo hitrosti se na pin ENA ali ENB dovede PWM signal, za nastavitev smeri vrtenja pa se na IN1 in IN2 za en motor ter IN3 in IN4 za drugi motor dovedeta nasprotna signala. Če je IN1 na logični 1 in IN2 na logični 0, se motor vrti v eno smer. Za spremembo smeri zamenjajte enice z 0. Sestaviti ga je treba z Arduinom po naslednjem diagramu (uporabite lahko poljubne pine; določite jih v skici).

Arduino vezje
Nato morate iz kartona narediti podlago in nanjo pritrditi kolesa. Dobiti bi morali nekaj takega:

Kartonska podlaga
Tukaj je pogled od spodaj. Dva pogonska kolesa z kotnim menjalnikom in kolesom za vlečenje:

Medosna razdalja
Zdaj morate sestaviti vezje, ki bo nameščeno na podstavek. Podstavek mora imeti premer približno 30 cm, da se vanj lahko namestita tako elektronika kot tudi sama enota sesalnika.

Sestavljanje ohišja
Namesto daljinomerov lahko uporabite sistem, nameščen na odbijaču, ki je povezan s končnimi stikali. Ob trku z oviro bo krmilni sistem signaliziral spremembo smeri.

Odbijač
Kontaktne odbijače lahko izdelate tudi sami. Potrebovali boste tanko, a togo žico, na primer zasukano parico. V ta namen na notranji strani odbijača ustvarite kontaktno blazinico s folijo in jo pritrdite, kot je prikazano spodaj. Ko robotski sesalnik trči v pohištvo ali stene, se bodo dotaknile. Prilagodite razdaljo od žice do folije, da dosežete želeno občutljivost in preprečite lažne alarme. Na folijo se dovede 5 V, žica pa gre na vhod Arduino, kjer je preko upornika več kiloohmov potegnjena na negativni pol.

Domači kontaktni odbijač
Naprava se napaja z baterijami; za napajanje krmilnega sistema se lahko uporabijo linearni stabilizatorji, kot je l7805. Za prilagajanje hitrosti motorja je primeren pretvornik s padajočim tokom, kot je LM2596.
Najtežji del je načrtovanje in sestavljanje sesalnika. Tukaj je groba risba:

Diagram sesalnika
Originalne lopatice ventilatorja odlomimo in na rotor pritrdimo turbino sesalnika. Pomembno je, da turbino natančno pritrdite na sredino, sicer boste ustvarili neravnovesja in vibracije.

Robotska turbina
Takole izgleda zadnji del turbine, ko je pritrjen na rotor hladilnika. Pritrdite ga lahko z vročim ali sekundnim lepilom.

Pogled na turbino od znotraj
To je vse, kar je treba navesti, podroben vodnik za sestavljanje robotskega sesalnika iz odpadnega materiala. Njegov algoritem delovanja je naslednji: robotski sesalnik se premika naprej, dokler ne naleti na oviro. Po trku (ali približevanju, če uporabljate ultrazvočne merilnike razdalj) se ustavi, premakne nazaj za vnaprej določeno razdaljo, se obrne pod naključnim kotom in nadaljuje s premikanjem.
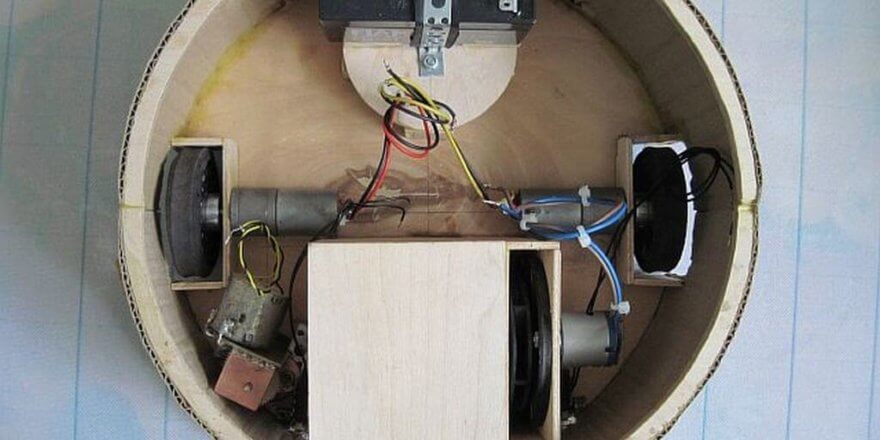
Ideja št. 2: Skoraj tovarniško podoben robot
Predstavljamo vam preprostejši projekt robotskega sesalnika. Takole izgleda sestavljen:

Domači robotski sesalnik
Navigacijski sistem je sestavljen iz šestih infrardečih senzorjev ovir. V primeru, da se noben od njih ne sproži, sta predvidena dva kontaktna senzorja (končna stikala). Sistem za krmiljenje motorja uporablja isti gonilnik z mikročipom L298N. Za sestavljanje boste potrebovali:
- Prvotno je bila uporabljena plošča Arduino, Pro-mini.
- USB-TTL adapter za programiranje tega modela Arduino. Če uporabljate Arduino Nano, ga ne boste potrebovali, saj podpira programiranje prek USB-ja.
- Gonilnik za motorje L298N.
- Motorji za kolesa z menjalnikom.
- 6 IR senzorjev.
- Motorji za turbino (če je mogoče, močnejši).
- Rotor turbine sesalnika.
- Krtačni motorji so lahko karkoli.
- 2 senzorja trčenja.
Vse to sestavite po tej shemi:

Diagram sestavljanja robotskega sesalnika
Za sestavljanje napajalnega vezja robotskega sesalnika boste potrebovali:
- Primerne so 4 litijeve baterije, tip 18650.
- 2 DC/DC pretvornika (povečevalni in zniževalni).
- Krmilnik za polnjenje in praznjenje dveh baterij (na spletu poiščite »2s li-ion controller«). Vezje uporablja zaporedno povezavo dveh vzporedno povezanih celic, kar ima za posledico izhodno napetost, večjo od 7,4 V. Vzporedno vezje se uporablja za povečanje kapacitete in življenjske dobe baterije.
Tukaj je diagram napajanja za tega robota:

Diagram napajanja
Poleg tega boste za telo robota potrebovali plastiko (PVC) ali kateri koli drug material; če imate takšno priložnost, ga lahko natisnete na 3D-tiskalniku.
Ta DIY projekt zahteva vdelano programsko opremo. Tukaj je primer algoritma za naključno čiščenje, ki smo ga našli na spletu. Skico lahko prenesete tukaj: vdelana programska oprema za robotski sesalnik.
V tem članku smo obravnavali dve zasnovi robotskih sesalnikov, ki ju lahko sami posnemate in sestavite. Samodejni čistilec prostorov lahko sestavite za med 30 in 100 dolarji. Najdražje komponente so baterije, motorji in plošče Arduino. Če ste uspešno sestavili doma narejen robotski sesalnik ali pa ste se domislili drugačne zasnove, delite svoje primere v komentarjih. Veselimo se odprte komunikacije!
Na koncu priporočamo ogled teh videoposnetkov, ki jasno prikazujejo še nekaj idej za izdelavo robotskega sesalnika doma:








Hvala za članek!
Za vašo informacijo, beseda "dvigatelya" v ruščini ne obstaja.
Ampak to je le kozmetična napaka članka.)
Živjo, jaz sem Jurij, končujem gradbeni projekt, prahu je morje, imel sem idejo, da bi naredil robotski sesalnik, ampak o elektroniki vem le toliko, kot bi v šoli. Pogledal sem nekaj materialov, všeč mi je bila metla Meleon, če jo namestiš na robotski sesalnik, bo majhen kotiček ostal neočiščen, vodoravno krtačo pa lahko narediš poljubno.
Najlepša hvala!!! To je zelo jasno! In kako zagotovim, da se hrana vrne v bazo?