Hur man bygger en robotdammsugare själv – 2 monteringsidéer
I dagens snabba livsstil är det inte alltid lätt att hålla hemmet rent. Modern teknik kan hjälpa till. Robotdammsugare har funnits i över 15 år. De liknar vanligtvis en stor puck som rör sig runt i rummet enligt ett förinställt mönster eller slumpmässigt (tills den stöter mot något) och samlar skräp. Vi erbjuder två steg-för-steg-instruktioner om hur du gör din egen robotdammsugare.
Material för montering
Så, för att montera en robotdammsugare behöver du förstå dess komponenter, låt oss gå igenom dem steg för steg. Den behöver kunna röra sig runt i rummet på egen hand, så den behöver motorer – två till fyra, beroende på den slutliga designen – samt möjligheten att byta rotationsriktning och hastighet, vilket innebär att du behöver ett motorstyrkort. Om du använder likströmsmotorer behöver du ett kort med fyra transistorer (en H-brygga).
En hemmagjord robotdammsugare måste upptäcka kollisioner med väggar och möbler. Detta kräver hindersensorer och gränsbrytare på "stötfångaren". Det fungerande elementet – dammsugaren – behövs också. Det måste vara konstruerat för att fungera med lågspänningslikström (t.ex. 12V).
Förutom en dammsugare behöver du en roterande borste som rengör ytan, lyfter matthögen och sopar bort skräp. Detta kräver ytterligare en eller två motorer.
Ett system som styr allt detta. Det enklaste alternativet är ett Arduino-kort. Vilket kort som helst duger för den här uppgiften; Nano- eller Pro-minikorten har rätt storlek för jobbet.
Idé nr 1: En robotdammsugare gjord av kartong
Robotens bas är gjord av tjock kartong. Det är bäst att limma ihop den i ett par lager, med fibrerna vinkelrätt placerade. För dess tekniska komponenter behöver du följande uppsättning delar:
- Vilket Arduino-kort som helst.
- Brödbräda eller en enkel brödbräda, i princip kan du klara dig utan den, bara löda allt.
- 2 ultraljudsavståndssensorer (avståndsmätare).
- Dammsugare turbin.
- En liten motor eller kylare från en dator.
- Motorer med växellådor och hjul.
- Motorstyrenhet.
- Ledningar för kretsanslutningar.
- Batterier och laddningsregulator.
Roboten behöver tre litiumbatterier för att driva den. Varje batteri har en spänning på 3,7 V. En styrenhet behövs för att ladda dem, som den på bilden:

Kontroller
För att styra robotens drivmotorer är det praktiskt att använda en modul baserad på ett L298-mikrochip. Detta är en H-bryggkrets, och du kan bygga den själv från enskilda komponenter, men att köpa ett färdigt kort är mer tillförlitligt. Det låter dig ställa in robotdammsugarens hastighet och ändra dess riktning.

Kontrollmodul
För att reglera hastigheten appliceras en PWM-signal på ENA- eller ENB-pinnen, och för att ställa in rotationsriktningen appliceras motsatta signaler på IN1 och IN2 för den ena motorn och IN3 och IN4 för den andra motorn. Om IN1 har en logisk 1 och IN2 har en logisk 0, roterar motorn i en riktning. För att ändra riktning, byt ut ettorna mot nollorna. Den ska monteras med en Arduino med hjälp av följande diagram (du kan använda vilka pinnar som helst; du anger dem i skissen).

Arduino-krets
Sedan behöver du göra en bas av kartong och fästa hjulen på den. Du bör få något liknande:

Kartongbas
Här är en vy underifrån. Två drivhjul med en vinkelväxel och ett länkhjul:

Hjulbas
Nu behöver du montera kretsen som ska monteras på basen. Basen bör vara cirka 30 cm i diameter för att rymma både elektroniken och själva dammsugarenheten.

Montering av fodralet
Istället för avståndsmätare kan du använda ett stötfångarmonterat system som är anslutet till gränsbrytare. Vid kollision med ett hinder signalerar styrsystemet en riktningsändring.

Stötfångare
Du kan också göra kontaktstötfångare själv. Du behöver en tunn men styv tråd, till exempel en tvinnad parkabel. För att göra detta, skapa en kontaktplatta på insidan av stötfångaren med hjälp av folie och fäst tråden som visas nedan. När robotdammsugaren kolliderar med möbler eller väggar kommer de att få kontakt. Justera avståndet från tråden till folien för att uppnå önskad känslighet och förhindra falsklarm. 5V appliceras på folien, och tråden går till Arduino-ingången, dras till negativ genom ett motstånd på flera kiloohms.

Hemgjord kontaktstötfångare
Enheten drivs av batterier; linjära stabilisatorer som l7805 kan användas för att driva styrsystemet. En nedströmsomvandlare, som LM2596, är lämplig för att justera motorhastigheten.
Den svåraste delen är att designa och montera dammsugaren. Här är en grov ritning:

Dammsugardiagram
Vi bryter av de ursprungliga fläktbladen och fäster en dammsugarturbin på dess rotor. Det är viktigt att säkra turbinen exakt i mitten, annars skapar man obalanser och vibrationer.

Robotturbin
Så här ser baksidan av turbinen ut när den är fäst vid kylarens rotor. Den kan fästas med lim eller superlim.

Vy över turbinen inifrån
Det var allt, en steg-för-steg-guide för att montera en robotdammsugare gjord av skrotmaterial. Dess arbetsalgoritm är följande: robotdammsugaren rör sig framåt tills den stöter på ett hinder. Efter kollisionen (eller närmandet, om du använder ultraljudsavståndsmätare) stannar den, rör sig bakåt en förutbestämd sträcka, vrider sig i en slumpmässig vinkel och fortsätter att röra sig.
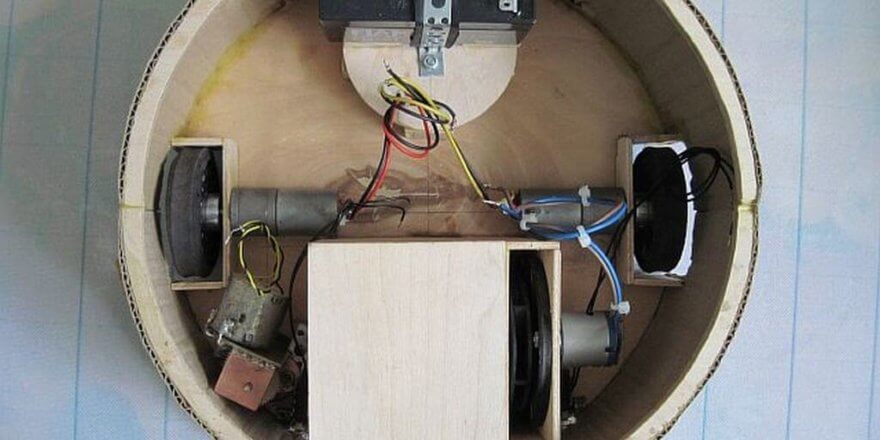
Idé nr 2: En nästan fabriksliknande robot
Vi presenterar ett enklare robotdammsugarprojekt. Så här ser det ut när det är monterat:

Hemgjord robotdammsugare
Navigationssystemet är sammansatt av sex IR-hindersensorer. Om ingen av dem utlöses finns det två kontaktsensorer (gränsbrytare). Motorstyrsystemet använder samma drivrutin med ett L298N-mikrochip. För att montera det behöver du:
- Arduino-kort, ursprungligen Pro-mini, användes.
- En USB-TTL-adapter för programmering av denna Arduino-modell. Om du använder en Arduino Nano behöver du den inte, eftersom den stöder programmering via USB.
- Drivrutin för L298N-motorer.
- Motorer för hjul med växellåda.
- 6 IR-sensorer.
- Motorer för turbinen (om möjligt, kraftfullare).
- Dammsugare turbinhjul.
- Borstmotorer kan vara vad som helst.
- 2 kollisionssensorer.
Montera allt detta enligt detta schema:

Monteringsschema för robotdammsugare
För att montera strömförsörjningskretsen för en robotdammsugare behöver du:
- 4 litiumbatterier, av typen 18650, passar.
- 2 DC/DC-omvandlare (upp- och nedspänning).
- En styrenhet för laddning och urladdning av två batterier (sök online efter "2s li-ion controller"). Kretsen använder en seriekoppling av två parallellkopplade celler, vilket resulterar i en utspänning större än 7,4 V. Parallellkretsen används för att öka kapaciteten och batteriets livslängd.
Här är strömförsörjningsschemat för den här roboten:

Strömförsörjningsschema
Dessutom behöver du plast (PVC) eller något annat material till robotkroppen; du kan skriva ut det på en 3D-skrivare om du har möjlighet.
Det här gör-det-själv-projektet kräver firmware. Här är ett exempel på en slumpmässig rengöringsalgoritm som vi hittade online. Ladda ner skissen här: firmware för en robotdammsugare.
Den här artikeln diskuterade två robotdammsugare som du kan replikera och bygga själv. Du kan bygga en automatisk rumsrengörare för mellan 30 och 100 dollar. De dyraste komponenterna är batterier, motorer och Arduino-kort. Om du har byggt en hemmagjord robotdammsugare eller kommit på en annan design, dela gärna dina exempel i kommentarerna. Vi välkomnar öppen kommunikation!
Slutligen rekommenderar vi att du tittar på dessa videor, som tydligt visar några fler idéer för att bygga en robotdammsugare hemma:








Tack för artikeln!
För din information är ”dvigatelya” inte ett ord på ryska.
Men detta är bara en kosmetisk defekt hos artikeln.)
Hej, jag heter Yuri och håller på att avsluta ett byggprojekt. Det är ett hav av damm. Jag fick idén att bygga en robotdammsugare, men jag kan bara så mycket om elektronik som jag skulle kunna i skolan. Jag tittade på några material och jag gillade Meleon-borsten. Om man sätter den på en robotdammsugare lämnar den ett litet hörn orenat, och den horisontella borsten kan göras precis som man vill.
Tack så mycket!!! Det är väldigt tydligt! Och hur ser jag till att maten returneras till basen?