DJI ROMO P: Disseny atrevit, evitació d'objectes superior, 25.000 Pa i una estació tot en un!

Hola a tots els lectors del projecte! Aquesta revisió examinarà el nou producte tan publicitat del 2025: l'aspirador robot DJI ROMO P. DJI és àmpliament conegut pels seus drons, i ara ha decidit entrar al mercat dels aspiradors robot amb una solució agosarada: un aspirador robot d'última generació amb una estació tot en un, amb un cos transparent tant per al robot com per a l'estació. Aquest nou producte compta amb diverses característiques interessants, com ara un sistema anti-retroil·luminació, monitorització remota de la llar, un raspall de cantonades, un drap de neteja de vores, un sistema anti-embolics i fins i tot 25.000 Pa de potència de succió. L'estació compleix tots els requisits moderns. Compta amb escalfament d'aigua, escalfament d'aire, un contenidor de pols autolimpiant, barreja automàtica de detergents i fins i tot una connexió al clavegueram i al subministrament d'aigua. En resum, ofereix un conjunt complet de funcions segons els estàndards del 2025. El preu oscil·la entre els 1.000 i els 1.800 €, depenent de si es demana des de la Xina o a un representant oficial de la marca. Així doncs, a continuació, provaré el DJI ROMO P en detall, destacant els avantatges i els inconvenients en funció dels resultats de les meves proves, i després expressaré la meva opinió sobre el robot. Així doncs, comencem!
Regionalisme
Comencem amb la part més molesta. En el moment d'escriure això, el DJI ROMO P és la versió pensada per al mercat xinès. Fora de la Xina, en connectar-se a l'aplicació, apareix una notificació que indica que la regió del model és incompatible. Connectar el robot a una xarxa o accedir al menú és impossible. Hi ha maneres d'eludir el bloqueig regional, però divulgar-les està prohibit per llei, per la qual cosa es recomana consultar els fòrums, com vaig fer jo. Un agraïment especial a Artem Belik per la seva ajuda per connectar el robot.

Bloqueig regional
Per cert, pel que sé, fins i tot els representants oficials de la marca venen actualment la versió xinesa amb protecció regional a les botigues en línia locals. Es preveu que s'anunciï una versió global d'aquest robot a finals d'octubre. La marca ja ha publicat un vídeo promocional a YouTube amb la data d'anunci fixada per al 28 d'octubre de 2025. Seria fantàstic que també aixequessin les restriccions regionals de les versions xineses en aquest cas.
Després de jugar una mica amb la pandereta, tot em va funcionar perfectament. Tornem a la revisió del robot en si.
Equipament
Va venir en aquesta caixa de marca:
Caixa
A més del robot i l'estació en si, el kit de lliurament inclou:
- Adaptador de corrent amb endoll xinès.
- Dos envasos amb detergents.
- Raspall turbo de recanvi per a catifes.
- Documentació de robots en xinès.
- Tub per connectar l'estació al subministrament d'aigua.
- Mànega per connectar el desguàs.
- Accessoris addicionals per connectar l'estació a les xarxes de serveis públics.

Equipament
Seguim endavant!
Aspecte
El DJI ROMO P és blanc. Vaig rebre la versió amb un mòdul per connectar-lo a les canonades de clavegueram i aigua per a la seva revisió.

Robot a l'estació de connexió de clavegueram
El robot aspirador en si té forma rodona, l'alçada del cos s'indica com a 98 mm, però en realitat és una mica més baixa, uns 96 mm.

Vista superior

Alçada del cos
La coneguda torre lidar a la part superior de la carrosseria ha desaparegut. Els sensors de paret estan muntats a banda i banda del para-xocs. El sistema de navegació del robot, format per sensors i càmeres il·luminades, es troba al centre.

Vista lateral
La tecnologia s'anomena Sistema de Visió Híbrida. Afirma que ofereix una evitació d'objectes d'alta precisió i una visió binocular d'ull de peix.
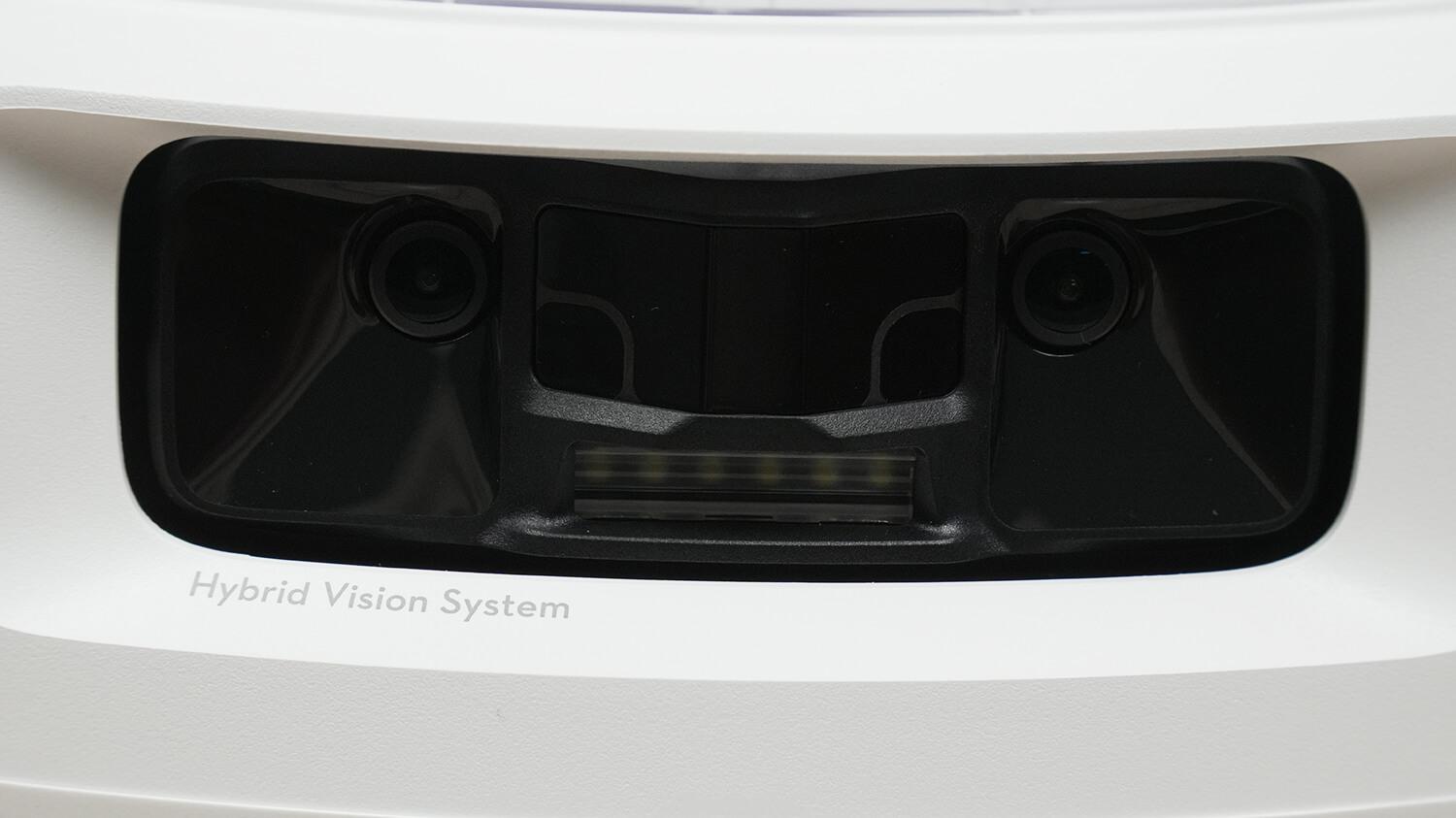
Sistema d'evitació d'objectes
La càmera també es pot utilitzar per a la monitorització remota de la vostra llar a través d'un telèfon intel·ligent.

Monitorització remota de la llar
A la part superior del cos hi ha dos botons de control mecànic i un indicador lluminós de l'estat del robot.

Botons al cos
El col·lector de pols és extraïble per la part posterior. Igual que el sistema de filtració, es pot esbandir amb aigua. El col·lector de pols té una capacitat de 260 ml. Hi ha una tapa situada a l'extrem per buidar els residus en una bossa situada a l'estació.

Ubicació del col·lector de pols
Sistema de filtració basat en filtre HEPA i malla.

Sistema de filtració
El dipòsit d'aigua no és extraïble, però és visible a través de la carcassa transparent. La seva capacitat és de 164 ml, el doble que la dels models premium. L'aigua es bomba automàticament a través de l'estació.
Sorprenentment, el robot només té tres sensors de protecció anticaigudes instal·lats a sota. També hi ha un sensor per a la catifa. Hi ha dos raspalls laterals, tots dos de tres feixos, fixats amb cargols. Un dels raspalls laterals s'estén fins a les cantonades per escombrar les deixalles.
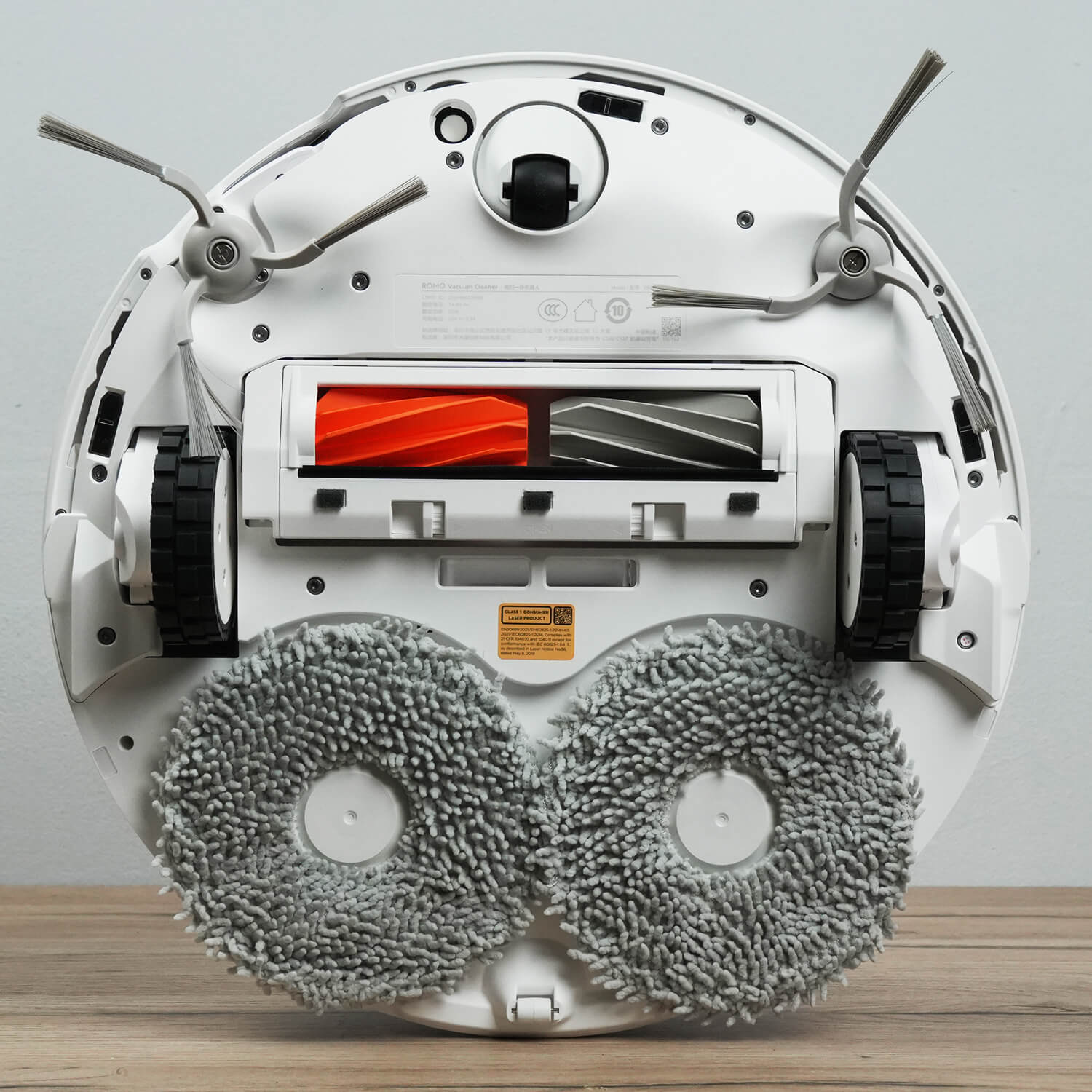
Vista inferior
La unitat de raspall central és flotant. El raspall central també s'aixeca automàticament durant la neteja del terra. El raspall turbo consta de dos mitges raspalls amb una obertura central per a l'eliminació de les restes. Aquest disseny no és únic, però ja ha tingut un bon rendiment en proves competitives.

raspall central
La unitat inclou raspalls de silicona que es poden desmuntar per al manteniment. Es poden substituir per raspalls de truges i pètals, que se suposa que són millors per recollir les deixalles, fins i tot a les catifes.
La neteja del terra es realitza amb dos draps rodons i giratoris fixats a suports amb velcro. Els draps són molt gruixuts i de bona qualitat.

Tovalloletes humides de neteja
Darrere d'un dels suports, veiem un mecanisme que estén el drap de neteja fins a la vora per a una neteja a fons del terra al llarg dels sòcols i a les cantonades. Tots dos draps de neteja s'eleven automàticament en entrar a les catifes, en mode de neteja en sec i quan el robot torna a l'estació.

Mecanisme d'alliberament de la vora del tovalló
Ara que ja hem tractat amb el robot, és hora de l'estació. Aquí, el DJI ROMO P no només es recarrega: neteja automàticament el dipòsit de la pols, renta les tovalloletes amb aigua calenta, barrejant automàticament detergent de dos recipients diferents, asseca les tovalloletes amb aire calent i asseca el dipòsit i la bossa de la pols. A més, inclou esterilització UV per a la bossa. I, com ja he esmentat, la versió que vaig rebre per a la revisió es connecta tant a les canonades de clavegueram com a les d'aigua.
La rampa del robot és extraïble, però la safata de les tovalloletes no, cosa que és un inconvenient. La provarem per veure com de fàcil és de mantenir.

Zona de rentat de tovallons
L'aigua s'escalfa durant el rentat i el procés d'assecat es fa amb aire calent. No he pogut trobar la temperatura d'escalfament al lloc web, però la comprovaré jo mateix durant les proves amb instruments.
Una bossa de residus i dos dipòsits de detergent es troben sota una coberta sobre la zona d'aparcament del robot. La bossa de residus estàndard de 2,4 litres té una capacitat de 400 ml de detergent normal, que es barreja automàticament amb aigua neta en rentar les tovalloletes. També hi ha un dipòsit de desinfectant separat de 200 ml. Podeu seleccionar quin detergent voleu utilitzar a la configuració.

Dipòsits i bosses de detergent
Pel que fa al mòdul, està instal·lat sota la coberta superior. El dipòsit d'aigua bruta allotja un filtre gruixut. El dipòsit d'aigua neta és de disseny estàndard.
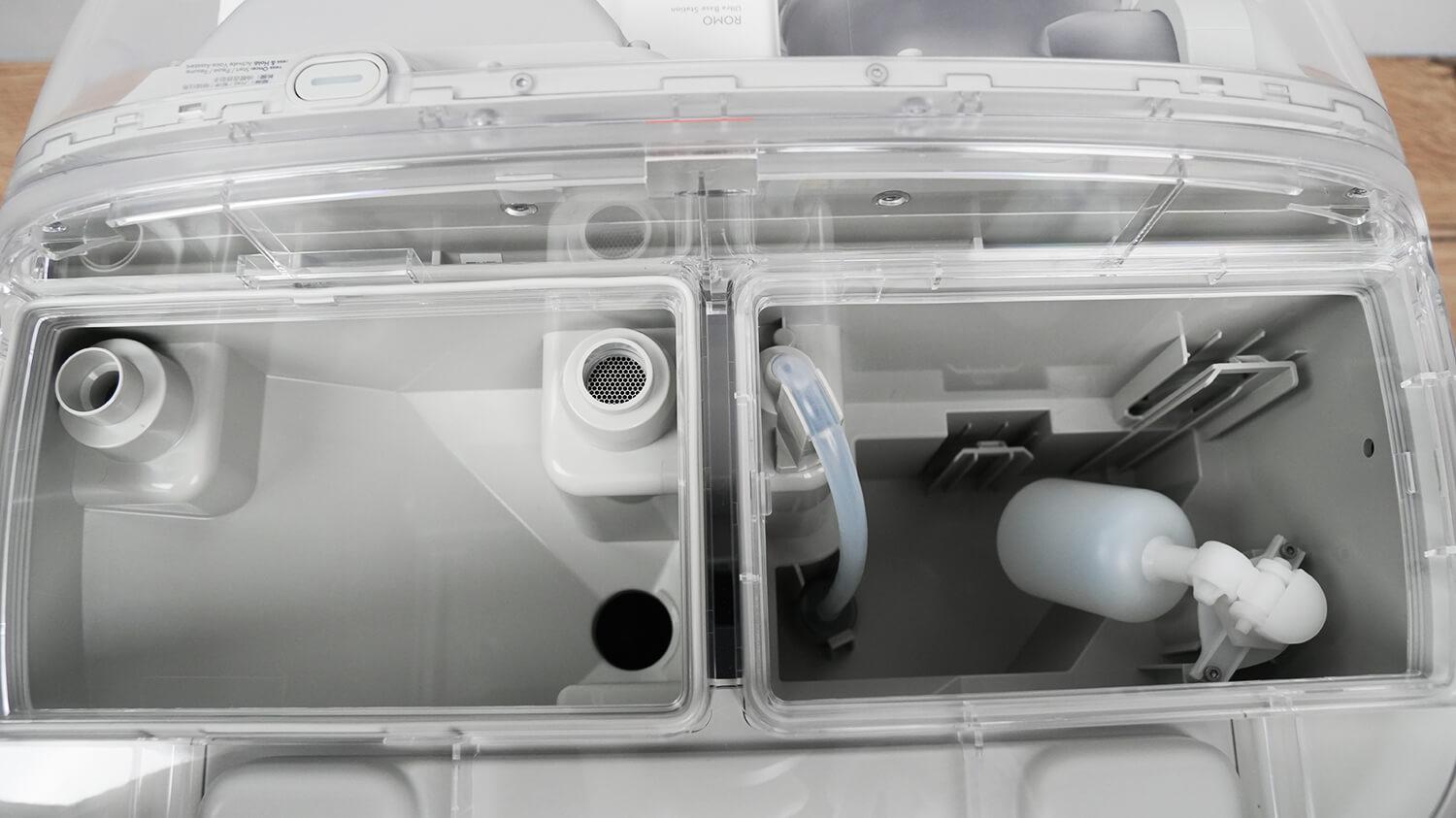
Compartiments d'aigua a l'estació
Tot el mòdul es pot treure de l'estació, cosa que és convenient per al manteniment.
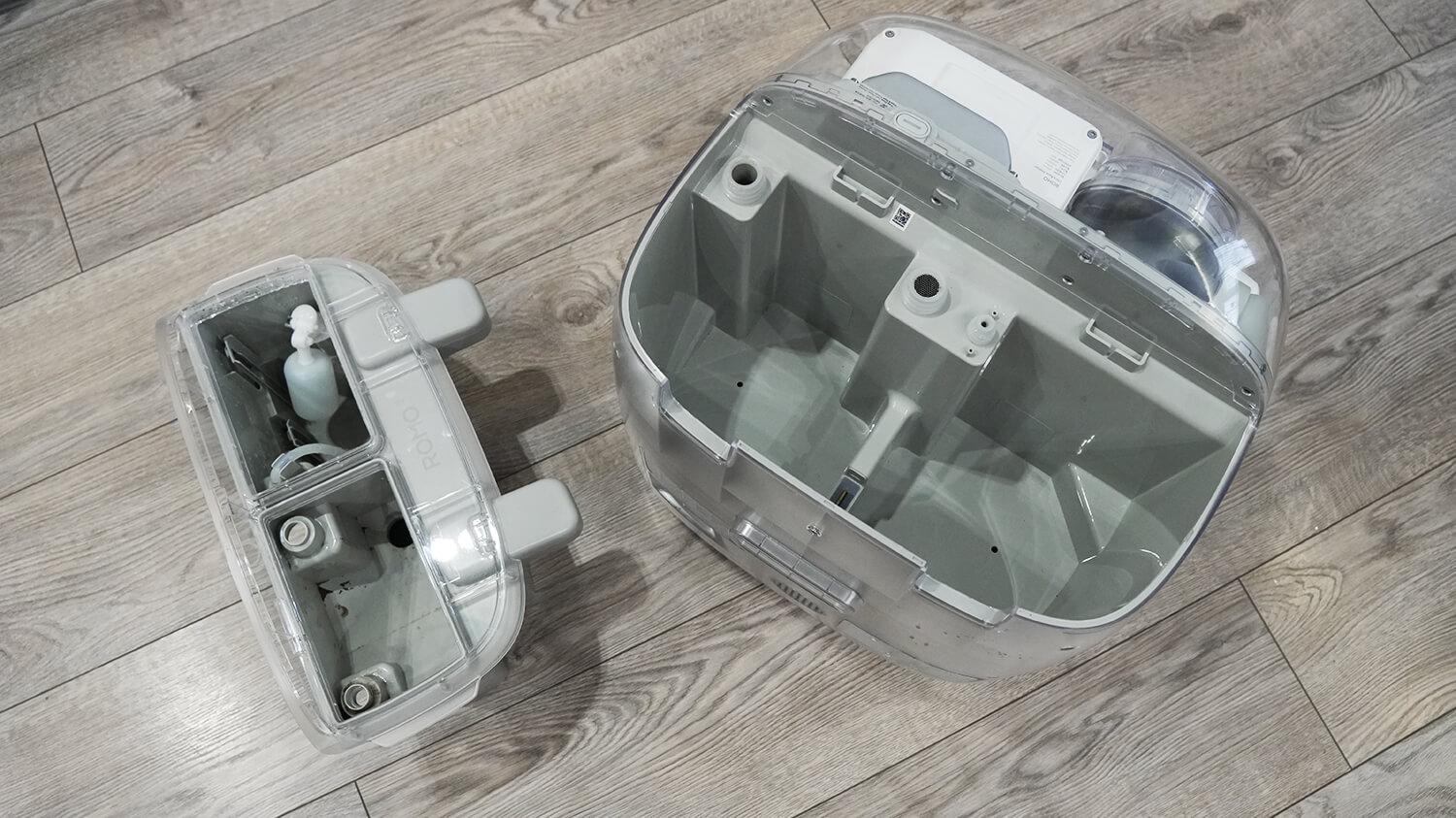
El mòdul s'ha retirat de l'estació
Però hi ha una advertència: espero que admetin la possibilitat de substituir aquest mòdul a l'estació per dipòsits d'aigua normals. Tanmateix, els representants locals de DJI van respondre que aquesta opció no és compatible. Com a mínim, no es pot comprar el mòdul o els dipòsits per separat. El robot es ven amb diferents versions d'estació per defecte. Si és així, aquesta és una decisió molt estranya i il·lògica que afecta negativament la versatilitat del robot malgrat la capacitat física de canviar l'opció. Espero que els representants s'equivoquin. Si algú sap del cert si és possible canviar el mòdul per dipòsits i viceversa, que comparteixi els seus motius als comentaris. Ho agrairé molt.
Fins ara, veiem que el robot té tant punts forts com punts febles. Vegem com es comporta a les proves.
Especificacions tècniques
Les principals característiques del DJI ROMO P, tal com indica el fabricant, es mostren a la pantalla:
Aspiradora robot:
- Bateria de ions de liti de 5000 mAh.
- Potència d'aspiració fins a 25.000 Pa.
- Recollidor de pols de 260 ml.
- Dipòsit d'aigua de 164 ml.
- Temps de funcionament: fins a 180 minuts.
- Dimensions: 352*98 mm.
Estació:
- Dipòsit de detergent: 400 + 200 ml.
- Bossa a l'estació: 2,4 l.
- Dimensions: 453*425 mm*440 mm
Aquí destaca la potència de succió més alta declarada, que es verificarà en proves. Les altres característiques estan en línia amb dispositius similars.
Capacitats funcionals
Passem a una visió general de les característiques del DJI ROMO P. Es controla mitjançant l'aplicació mòbil patentada DJI Home. A més del bloqueig regional, hi ha una altra advertència: la interfície de l'aplicació és en anglès i algunes funcions ni tan sols estan traduïdes a l'anglès, romanent en xinès, cosa que dificulta la familiarització amb la funcionalitat del robot. Per cert, parla anglès i xinès.

Control mitjançant l'aplicació
Totes les funcions principals es mostren a la pantalla:
- Col·lector de pols autolimpiant.
- Rentar tovallons amb aigua calenta.
- Assecar tovallons amb aire calent.
- Assecat del col·lector de pols i de la bossa d'escombraries.
- Addició automàtica de detergent.
- Aixecant els eixugaparabrises i el raspall central.
- Extensió del raspall lateral a les cantonades.
- Moure el tovalló al rodapié.
- Identificació d'objectes al terra.
- Identificació de punts.
- Il·luminació de la càmera en condicions de poca llum.
- Monitorització remota de la llar a través d'un telèfon intel·ligent.
- Desar diversos mapes de neteja a la memòria.
- Zonificació automàtica de les instal·lacions en habitacions.
- Selecció de zones i habitacions per a la neteja.
- Parets virtuals i zones prohibides (i per al mode de neteja en humit).
- Ajust de la potència d'aspiració.
- Establir la freqüència de rentat de tovallons.
- Mode d'usuari.
- Registre de neteja.
- Organitzar la neteja segons un horari.
- Augment automàtic de la potència a la catifa.
- Neteja de catifes en mode de neteja humida.
- Suport per a l'assistent "Ei, ROMO".
En general, hi ha moltes opcions per a configuracions de neteja flexibles, però no totes s'implementen convenientment. Per exemple, és impossible, o si més no no he pogut esbrinar com configurar la freqüència de neteja de les netejades de l'estació en un interval de temps especificat, per zona o després de netejar una zona específica. Simplement hi ha tres nivells de freqüència.
Hem implementat l'assistent de veu propietari "Ei, ROMO", però només és compatible amb xinès.
Bé, no vaig descobrir cap característica interessant única.
Proves
Ja s'ha preparat i publicat al canal una revisió detallada en vídeo amb totes les proves:
Navegació
I ara la part més interessant: les proves. Comencem navegant per una habitació amb obstacles. Curiosament, el robot comença a netejar la zona seleccionada en un patró serpentejant. Va escombrar amb cura les potes de la taula i la caixa. Després d'escombrar la zona disponible, va passar a recórrer el perímetre. Va escombrar amb cura les potes de l'assecadora i el mirall no va introduir cap error al mapa. Tanmateix, és interessant que no hagi escombrat una zona petita. Hi tornarem més endavant en aquesta revisió.

Navegant per una sala d'obstacles
Parlant de navegar per dins de la casa, el robot aspirador netejava habitació per habitació en un patró serpentejant, i després al llarg del perímetre. De tant en tant, s'aturava a l'estació de neteja per rentar les tovalloletes i després continuava netejant des d'on ho havia deixat. No quedaven zones sense netejar; la prova estava superada!
Passant per sota de mobles baixos
També es va provar l'alçada mínima lliure del robot. El robot entra fàcilment en una distància lliure estàndard de 10 cm i neteja dins d'aquesta amb la retroiluminació encesa.

Passant per sota de mobles baixos
Autonomia
També vaig provar la durada de la bateria quan el robot estava en funcionament a la màxima potència amb la neteja en humit activada. Va durar 224 minuts, netejant 106 metres quadrats d'espai útil. La durada de la bateria del robot està a l'alçada dels robots premium, però hi ha una advertència. El vaig fer funcionar a la màxima potència per última vegada, però en mode de neteja en sec, per demostrar un punt important.
Quan s'utilitza la neteja en sec i en humit, el robot necessita aproximadament una hora i mitja per netejar una habitació de 40 metres quadrats. Durant el cicle de neteja, el robot va rentar la roba 4 o 5 vegades. En el mode de neteja en sec, neteja durant poc més de 40 minuts. Això es deu al fet que el procés de rentat de la roba és molt llarg, ja que triga uns 10 minuts per cicle, en comparació amb els 2-3 minuts de robots similars. No el vaig executar per a la neteja en sec i en humit una tercera vegada només perquè la bateria només es carrega un petit percentatge en 10 minuts, cosa que provoca inexactituds en les mesures de durada de la bateria a causa dels llargs temps d'autoneteja i càrrega.
Identificació d'objectes al terra
Pel que fa al sistema d'evitació d'objectes, està molt ben implementat. Amb bona il·luminació, el DJI ROMO P va ser capaç d'identificar i evitar amb precisió 6 de 6 objectes domèstics, 3 de 3 mitjons, 4 de 4 cables i 6 de 6 sorpreses simulades de mascotes. L'únic inconvenient és que el sistema de sensors i càmeres detecta objectes a terra, però no reconeix què hi ha exactament. Això probablement millorarà amb una actualització del firmware, però encara no puc confirmar el reconeixement d'objectes.
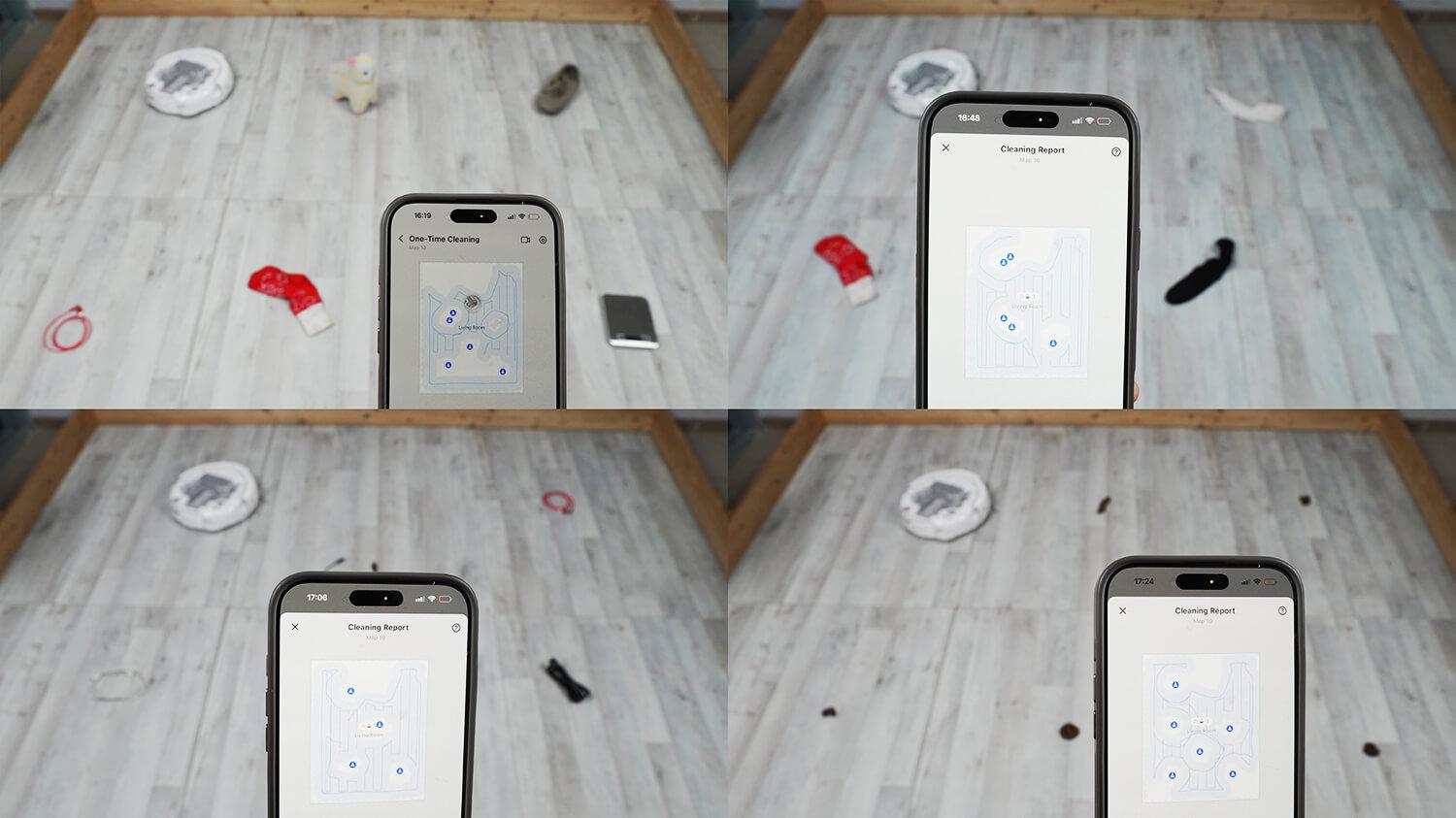
Identificació d'objectes al terra
En completa foscor, el DJI ROMO P també va ser capaç d'identificar i navegar amb precisió al voltant de sis dels sis objectes domèstics, tres mitjons i quatre cables. Malauradament, es va enganxar i va rosegar un dels sis, mentre evitava els altres cinc amb seguretat. Un resultat gairebé perfecte! Bravo, enginyers de DJI!
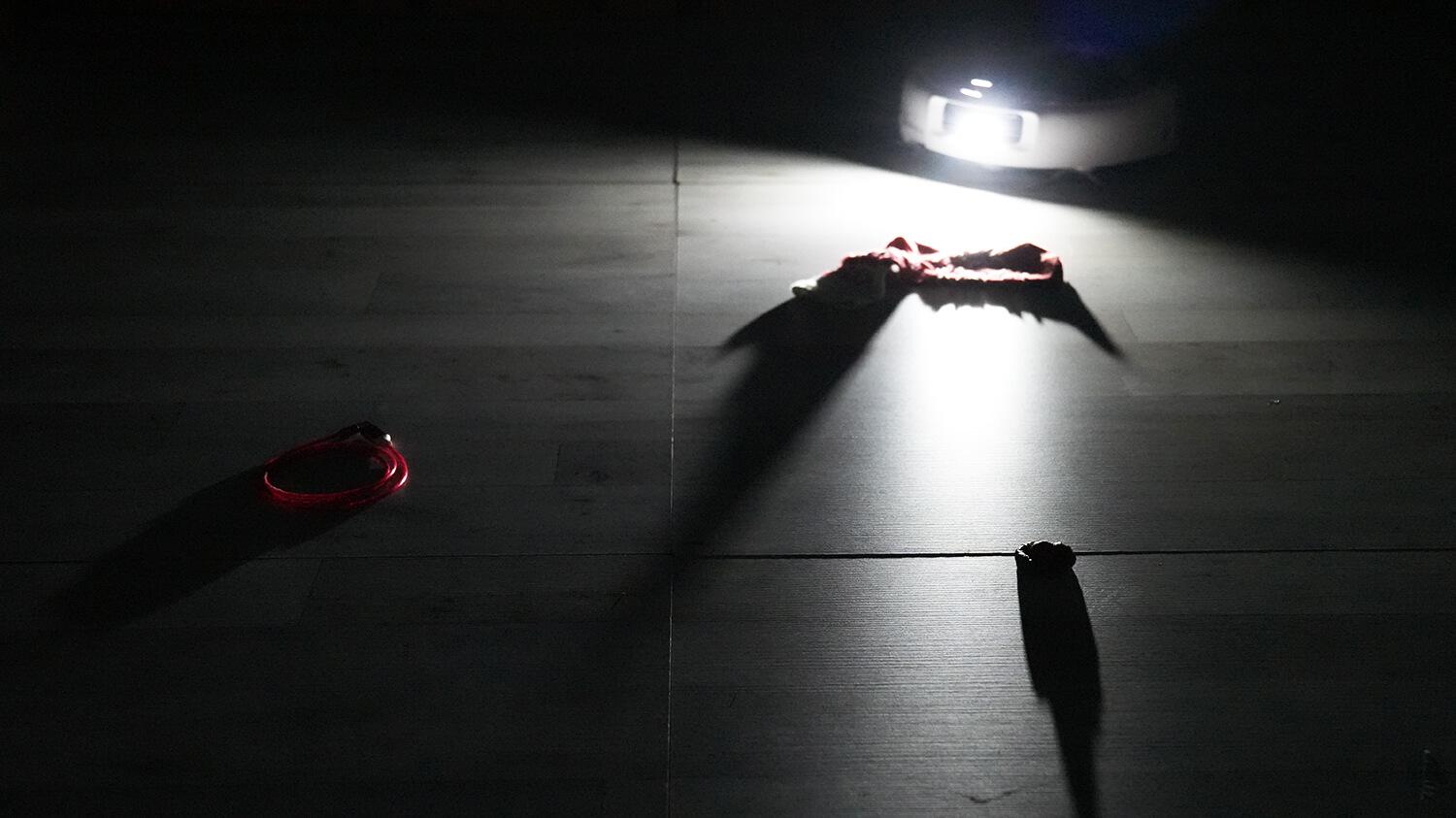
Identificació d'objectes a la foscor
Els materials promocionals afirmen que el robot aspirador pot detectar i evitar fins i tot objectes prims. Ho vaig provar amb una carta de joc i un forfet. Ostres, el robot va netejar perfectament al voltant dels dos objectes i va tornar a l'estació.

Targetes identificatives al terra
L'última cosa que vaig provar va ser com el DJI ROMO P detecta tolls i taques al terra. Vaig vessar quètxup, llet i aigua neta al terra. Aquesta és la situació: va detectar la taca de quètxup al segon intent, però no va detectar la llet i l'aigua, fins i tot després de passar-hi per sobre en mode estàndard. En detectar la taca de quètxup, el robot apaga l'aspiració i aixeca el raspall turbo, girant les seves coixinets. No s'inclouen interaccions addicionals, com ara la neteja de punts. Després de netejar la zona seleccionada, el robot simplement tornava a l'estació, tot i que la taca no s'havia eliminat completament. En resum, la detecció de taques hi és, però és rudimentària, igual que en robots similars.

Identificació de punts
Però en qualsevol cas, puc dir que el DJI ROMO P té un sistema d'evitació d'objectes molt ben implementat. Un dels millors entre els robots que he analitzat.
Neteja darrere les cortines
També vaig comprovar si el sistema de navegació podia netejar darrere de cortines i cortines, una cosa que la majoria de robots lidar no poden fer. No, aquest robot, com la majoria dels altres robots, no neteja darrere de cortines.
Potència de succió
Pel que fa a la potència de succió, el robot aspirador va ser capaç de netejar parcialment una escletxa de 2 mm de profunditat en mode "Silenciós", mentre que en mode "Estàndard", va netejar 2 mm de manera més eficaç. En mode "Turbo", una escletxa de 2 mm de profunditat es va netejar completament, i en mode "Profund", el robot encara va aconseguir netejar parcialment una escletxa de 8 mm de profunditat en dos punts.

Potència de succió
Igual que amb productes similars amb el mateix raspall central, la potència d'aspiració real augmenta, però no tant com s'afirma, a causa del disseny d'aquests raspalls. A causa de l'obertura d'aspiració més gran i la distància entre els raspalls i la carcassa, s'han produït pèrdues aerodinàmiques. Tot i que no són tan crítiques com amb alguns competidors premium, no obstant això, hi són presents.
Neteja en sec
El rendiment de neteja en sòls laminats és excel·lent: el robot va recollir totes les restes del terra, incloses les boletes de sorra per a gats grans i pesades que sovint es queden enganxades als raspalls turbo. La neteja de les cantonades és particularment impressionant: el raspall lateral retràctil recull totes les restes. Les cantonades exteriors també es netegen, tot i que queden alguns petits punts cecs.

Neteja en sec
Mireu l'estat del mòdul de neteja. Podeu veure que el raspall central està lleugerament enredat, igual que els raspalls laterals. Però no és crític, donada la quantitat de residus al suport. Calen més proves!
Protecció capil·lar anti-embolics
Vaig provar la capacitat d'autoneteja del raspall turbo: vaig estendre cabells de diferents longituds pel terra. El robot els va recollir, però els cabells es van enredar al raspall. Tot i que aquests semiraspalls són més fàcils de netejar, els raspalls de disseny similar són molt millors per eliminar el pèl i el pèl. Això probablement es deu a la velocitat, la forma i el material.
I aquí teniu l'estat dels raspalls després d'una setmana d'ús en un apartament amb una mascota que perdia pèl:

Condició dels pinzells a la vida quotidiana
En aquestes condicions, els raspalls estan nets, així que considero que el mòdul de neteja és eficaç per evitar que els cabells i el pèl s'enredin!
Neteja de catifes
Vaig provar el rendiment de neteja de catifes. Puc dir que el DJI ROMO P va netejar a fons les catifes de pèl curt. També va netejar a fons les catifes de pèl mitjà. No obstant això, el raspall de silicona encara té dificultats per capturar les restes grans. El raspall de truges de pètals funciona millor en aquest sentit.

Neteja de catifes
Autoneteja
Immediatament després de les "proves de brutícia", vaig comprovar com de bé s'autonetejava el robot aspirador. El vaig tornar a l'estació i vaig iniciar el procés d'autoneteja. Els resultats no van ser perfectes, però crec que van ser bons. Potser em vaig enganxar un pèl quan vaig treure i tornar a instal·lar el contenidor de pols.

Autoneteja
Neteja humida i catifes
Pel que fa a la neteja en humit de terres amb moqueta, hi ha diverses opcions de comportament del robot. La primera és aixecar automàticament els draps de neteja en entrar a les catifes, permetent que el robot aspiri i fregui el terra simultàniament, deixant les catifes seques i netes. La segona opció és habilitar l'evitació automàtica de les catifes durant la neteja en humit. El tercer mode és ignorar les catifes, en què el robot gira els draps de neteja sobre la pila, realitzant així la neteja en humit. Alguns prefereixen aquest tipus d'interacció. Una altra opció és passar per sobre de les catifes sense netejar-les.

Neteja humida i catifes
Netejant la brutícia
El rendiment de neteja també és excel·lent. El drap pressiona fermament contra el terra i absorbeix la brutícia. El robot també neteja les vores de la zona de neteja més a fons gràcies a que un dels draps s'estén fins al sòcol.

Netejant la brutícia
No obstant això, encara hi ha un punt cec, que va des d'uns quants mil·límetres fins a un centímetre, ja que el robot manté una curta distància de les parets.

Punt cec
Eliminació de taques
Pel que fa a fregar les taques difícils, el robot va ser capaç d'eliminar fins i tot les taques seques de cafè i salsa. I el més interessant és que només va caldre quatre passades per eliminar la majoria de les taques, i en només cinc passades va eliminar completament el mínim residu de salsa del suport, mentre que de cinc a sis passades es considera excel·lent.

Eliminació de taques
Aquest és ara el millor resultat del projecte! Probablement és degut a la pressió de les catifes al terra i al gruix de les catifes en si, però el fet és que el DJI ROMO P va funcionar de manera magnífica.
Prova de rentat i assecat de tovallons
M'agradaria parlar immediatament de l'eficiència de l'estació en si. Comencem amb la qualitat de neteja de les tovalloletes. Fins i tot després de proves exhaustives, les tovalloletes tenen un aspecte significativament millor després de rentar-les amb l'estació. La funció d'escalfament d'aigua i la barreja automàtica de detergent milloren sens dubte l'eficiència de neteja.
En un entorn domèstic, després de rentar el terra, les tovalloletes s'esbandeixen a fons a l'estació. No es va detectar cap contaminació visible.
Vaig decidir provar la temperatura de rentat jo mateix; en el meu cas, la temperatura màxima a la zona del desguàs va ser de 46,4 graus. Després d'esbandir, però, la temperatura dels draps era més propera a la temperatura ambient, al voltant de 24-25 graus, ja que la temperatura d'escalfament de l'aigua disminueix durant el cicle de rentat.

Temperatura dels tovallons després del rentat
La temperatura d'assecat de les tovalloletes és alta: el sensor mostrava més de 44 graus, i això és un bon resultat!

Temperatura d'assecat per a tovallons
Manteniment de l'estació
Unes paraules sobre el manteniment de l'estació. Després d'una setmana d'ús del robot en un entorn domèstic, observem que la part inferior de l'estació està una mica bruta. Traiem la rampa i la rentem. Tanmateix, els altres components no són extraïbles i s'hauran de netejar a la zona d'instal·lació de l'estació, cosa que no és gaire convenient.
franquícia d'obstacles
El robot té bona maniobrabilitat. Pot creuar un llindar de 2 cm.

franquícia d'obstacles
Conduir sobre superfícies negres
Conduir sobre catifes negres no és cap problema. El robot llisca sobre la catifa negra com si no hagués passat res.

Conduir sobre superfícies negres
Nivell de soroll
Pel que fa al nivell de soroll, oscil·la entre els 57 i els 68,5 dB, depenent del mode de funcionament seleccionat. El nivell de soroll del robot és baix, fins i tot tenint en compte la seva major potència.

Nivell de soroll
El nivell de soroll de l'estació durant l'autoneteja és d'entre 67 i 70 dB. I això és un bon resultat!
Opinió personal
L'aspirador robòtic DJI ROMO P ha estat revisat i provat exhaustivament. el nostre sistema d'avaluació va aconseguir guanyar 218 puntsEl resultat no és tan alt a causa d'una sèrie de problemes que es tractaran a continuació. Tanmateix, el robot no s'inclou a la qualificació general a causa del bloqueig regional. Almenys fins que hi hagi suport per a la nostra regió.
Valoració general dels robots aspiradors provats: https://robovac.washerhouse.com/ca/rejtingi/robovac-obshhij-rejting-robotov-pylesosov-robo.html.
Destacaré els avantatges i els inconvenients que he descobert i després compartiré la meva pròpia opinió sobre el robot. M'han agradat els següents:
- Un sistema d'evitació d'objectes molt precís tant en bona il·luminació com en foscor. El robot pot fins i tot evitar objectes com targetes bancàries, i això és increïble!
- Una estació tot en un completament carregada segons els estàndards del 2025. Compta amb rentat de tovalloletes amb aigua tèbia, assecat per aire calent, un contenidor de pols autolimpiant, barreja automàtica de detergent des de dos dispensadors i fins i tot una làmpada UV per a la desinfecció de residus.
- El robot i l'estació tenen un disseny atrevit. Les opinions poden diferir, però personalment vaig tenir un efecte "wow" i considero el disseny molt interessant, cosa que diferencia aquest model de models similars. També demostra que la marca no té por de mostrar l'interior del robot, i la qualitat de construcció és molt alta, segons l'avaluació visual.
- Es preveu una estació per a la connexió al clavegueram i al subministrament d'aigua.
- Neteja de terres d'alta qualitat en grans superfícies. El robot pot eliminar les taques difícils més ràpidament que els seus competidors, netejar terres fins als sòcols i esbandir els coixinets de neteja a l'estació. També aixeca els coixinets de neteja de les catifes, cosa que permet aspirar i fregar simultàniament, deixant les catifes seques i netes.
- Augment de la potència de succió.
- Neteja en sec d'alta qualitat en diverses superfícies.
- El raspall turbo és més fàcil de netejar de cabells i pèls enredats i, en condicions domèstiques, pot perdre pèls i pèls, romanent net fins i tot després de diverses setmanes d'ús.
- Aixecar el raspall central en rentar el terra.
- El raspall lateral s'estén fins a les cantonades per escombrar les restes.
- Dos raspalls laterals, per als quals això continua sent un factor important a l'hora de triar un robot aspirador.
- El dipòsit d'aigua del robot és ampli. La seva capacitat és més gran que la de molts dispositius similars.
- Funció de monitorització remota de la llar mitjançant càmera robotitzada.
- L'àmplia gamma de funcions de l'aplicació pròpia permet configuracions de neteja flexibles.
- Bona capacitat de cross-country.
- El robot aspirador no té por de les catifes negres.
- Baix nivell de soroll del robot.
Ara sobre els comentaris:
- En primer lloc, en el moment d'escriure aquest article, el DJI ROMO P està pensat per al mercat xinès i té bloqueig regional. Sense alguns passos addicionals, no el podreu utilitzar fora de la Xina continental.
- A més del bloqueig regional, hi ha altres inconvenients associats a la versió xinesa. Concretament, les instruccions són en xinès, la interfície de l'aplicació és parcialment en anglès i parcialment en xinès, i el robot només parla aquests dos idiomes. A més, l'assistent integrat només funciona en xinès.
- No està clar si el mòdul de connexió de clavegueram i els dipòsits d'aigua són intercanviables. Si no, és molt inconvenient que no es pugui comprar el mòdul com a opció, sinó que s'hagi de triar una de les estacions.
- La potència de succió més alta declarada no es va confirmar a les proves.
- En el moment d'escriure això, el robot no reconeix què hi ha a terra davant seu i no ho mostra amb icones al mapa. No puc confirmar la presència d'intel·ligència artificial.
- No neteja darrere de cortines i cortines.
- La plataforma de rentat de tovallons no extraïble de l'estació és difícil de netejar.
- L'estació triga molt a rentar la roba. El cicle triga fins a 10 minuts. Si fas cinc rentades d'aquest tipus en una sola sessió de neteja, el temps de neteja serà el doble. També cal afegir que és inconvenient que no es pugui triar la freqüència de rentat de la roba en funció d'un temps o una àrea determinada.
- Un altre inconvenient és la manca de zones quan el robot s'executa en un mapa sense una estació. Això podria ser, per exemple, el segon pis. Quan es feien proves en zones específiques, per alguna raó sempre s'evitava una petita àrea buida, com si els algoritmes l'haguessin programat per ser una estació. No està clar per què és necessari, però als bancs de proves, sempre hi havia una petita zona que el robot sempre evitava.
Així doncs, quina és la conclusió? Al meu entendre, l'entrada de DJI al mercat dels robots aspiradors ha estat molt reeixida. Han aconseguit combinar un dels millors sistemes d'evitació d'objectes del mercat, una excel·lent neteja en sec i en humit, una major potència d'aspiració i una estació de càrrega completament equipada en la seva solució estrella. I tot això en un disseny atrevit i transparent, del qual molta gent va parlar durant el llançament. Tot aquest conjunt de funcions funciona realment bé. Si poguessin afegir funcions que es troben en competidors premium, així com les seves pròpies capacitats úniques, podrien competir amb confiança pel títol d'un dels millors robots aspiradors del 2025. Però, sobretot, el bloqueig regional del dispositiu és una veritable decepció. Poca gent voldrà esbrinar com evitar-lo, i no és un fet que els mètodes que funcionen ara continuïn funcionant.
Per tant, espero que apareguin versions adaptades amb russificació completa, que s'afegeixin noves característiques úniques als models actualitzats i que es treballi per eliminar els problemes.
Això és tot de part meva. Si teniu cap pregunta, feu-la als comentaris. Bones compres a tothom. Adéu!







