Roborock Saros Z70: no només neteja, sinó que també recull coses del terra! El primer robot aspirador amb braç mecànic!

Hola a tots els lectors de robovac.washerhouse.com! En aquesta ressenya, examinaré el robot aspirador estrella tan cobejat, el Roborock Saros Z70. La seva característica principal és el seu braç extensible, que permet al robot recollir objectes del terra i col·locar-los a les zones designades durant la neteja. Això significa que el Z70 no només aspira i frega el terra, sinó que també elimina qualsevol objecte no desitjat que trobi al seu pas, cosa que és especialment important quan teniu nens o mascotes a casa. A més, el nou producte compta amb una potència de succió augmentada de 22.000 Pa, un nou raspall turbo amb fulles, un cos prim de 8 cm i una estació multifuncional tot en un. Per un paquet tan complet, haureu de pagar uns 2.000 €. A continuació, provaré a fons el Roborock Saros Z70, destacaré els seus avantatges i desavantatges en funció dels resultats de les meves proves i després compartiré la meva opinió personal. Així doncs, anem-hi!
Equipament
El robot aspirador va arribar en una caixa de marca com aquesta:

Caixa
A més del robot i l'estació, el kit de lliurament inclou:
- Adaptador de corrent.
- Bossa de recanvi per a l'estació.
- Una cistella de marca per guardar els articles recollits pel robot.
- I les instruccions d'ús traduïdes al rus.

Equipament
Aspecte
Ara fem una ullada al disseny del Roborock Saros Z70. Comencem amb el robot aspirador en si. Està disponible en dos colors: negre-gris i negre. El seu cos és rodó i mesura 7,98 cm d'alçada.

Vista superior
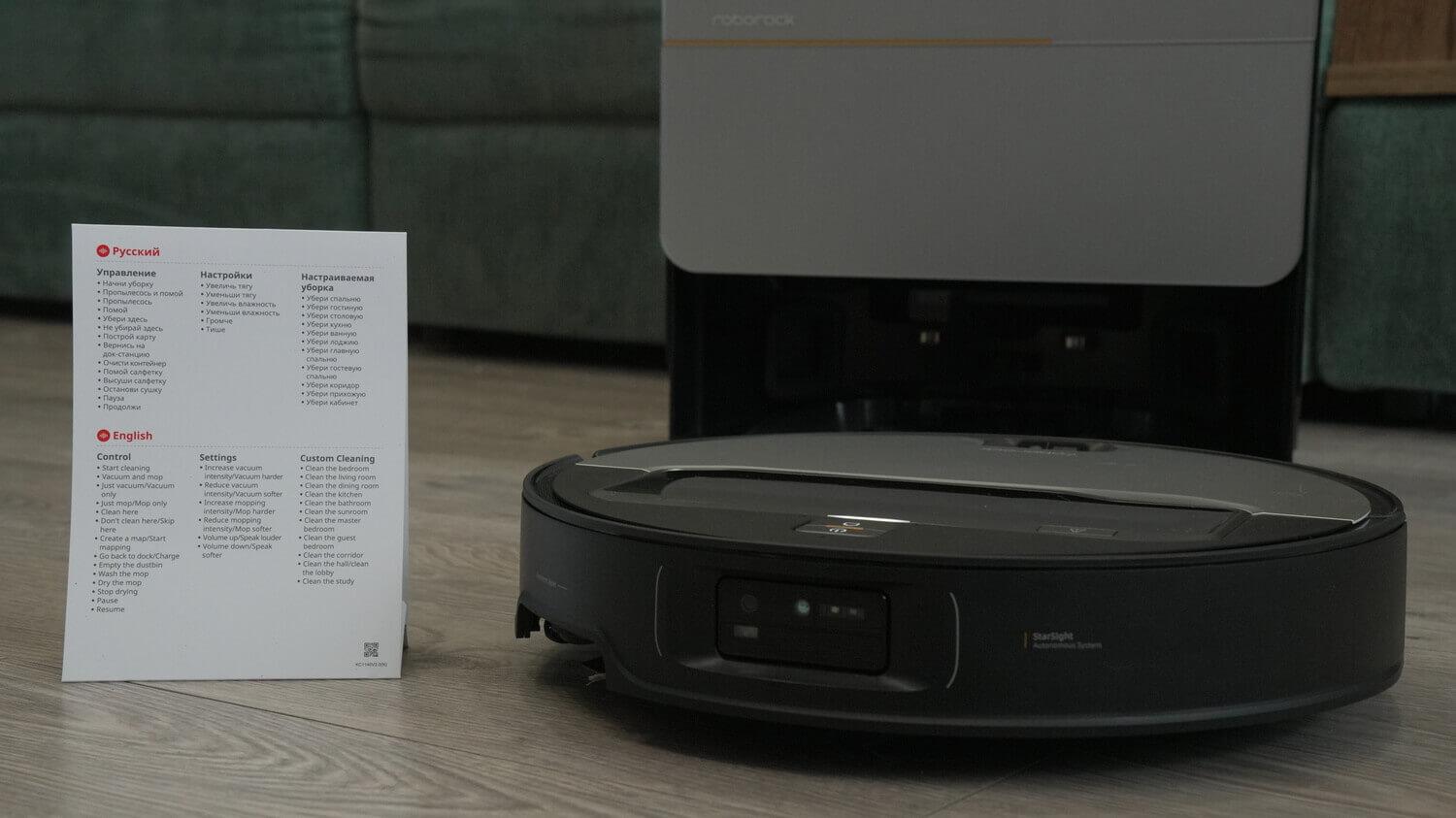
El robot no té la torre lidar habitual. La seva navegació es basa en un sistema de càmeres i sensors al para-xocs. La tecnologia s'anomena StarSight Autonomous System 2.0, igual que la del Roborock Saros 10R llançat anteriorment.

Càmera frontal

Càmera posterior

cambra alta
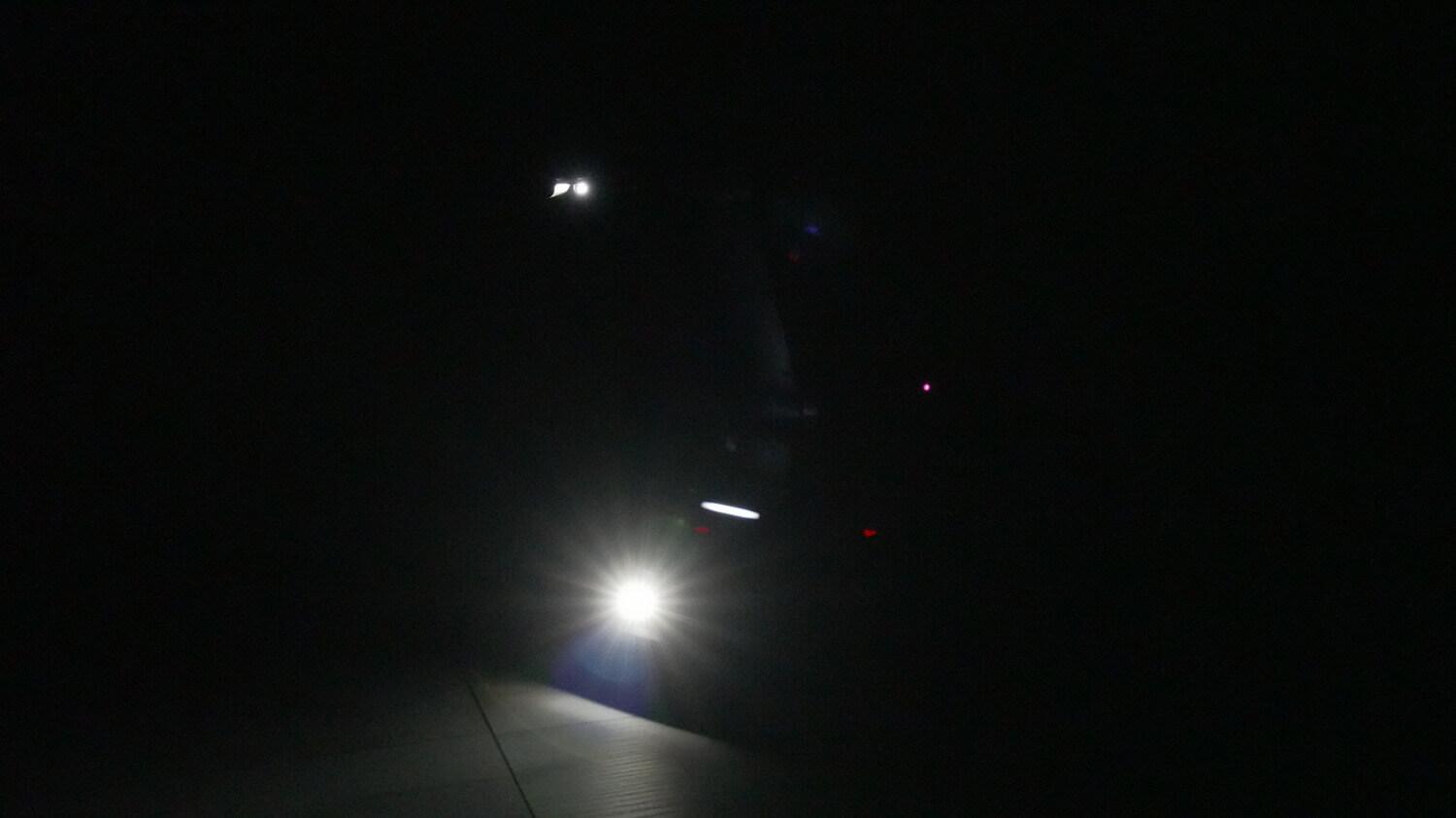
S'ha implementat una funció per reconèixer objectes a terra. A més, gràcies a la retroiluminació, el robot pot reconèixer objectes fins i tot en la foscor completa. Les càmeres estan instal·lades no només a la part frontal i lateral, sinó també a la part superior, cosa que és necessària perquè el robot pugui avaluar si el braç pot estendre's més enllà del seu cos.
Afegiré que la càmera frontal no només s'utilitza per a la navegació, sinó també per a la monitorització remota de la llar a través d'un telèfon intel·ligent.
Dues retroiluminació
Continuant amb els sensors, el robot està equipat amb un sensor de paret, 6 sensors de protecció anticaigudes i un sensor de catifa.
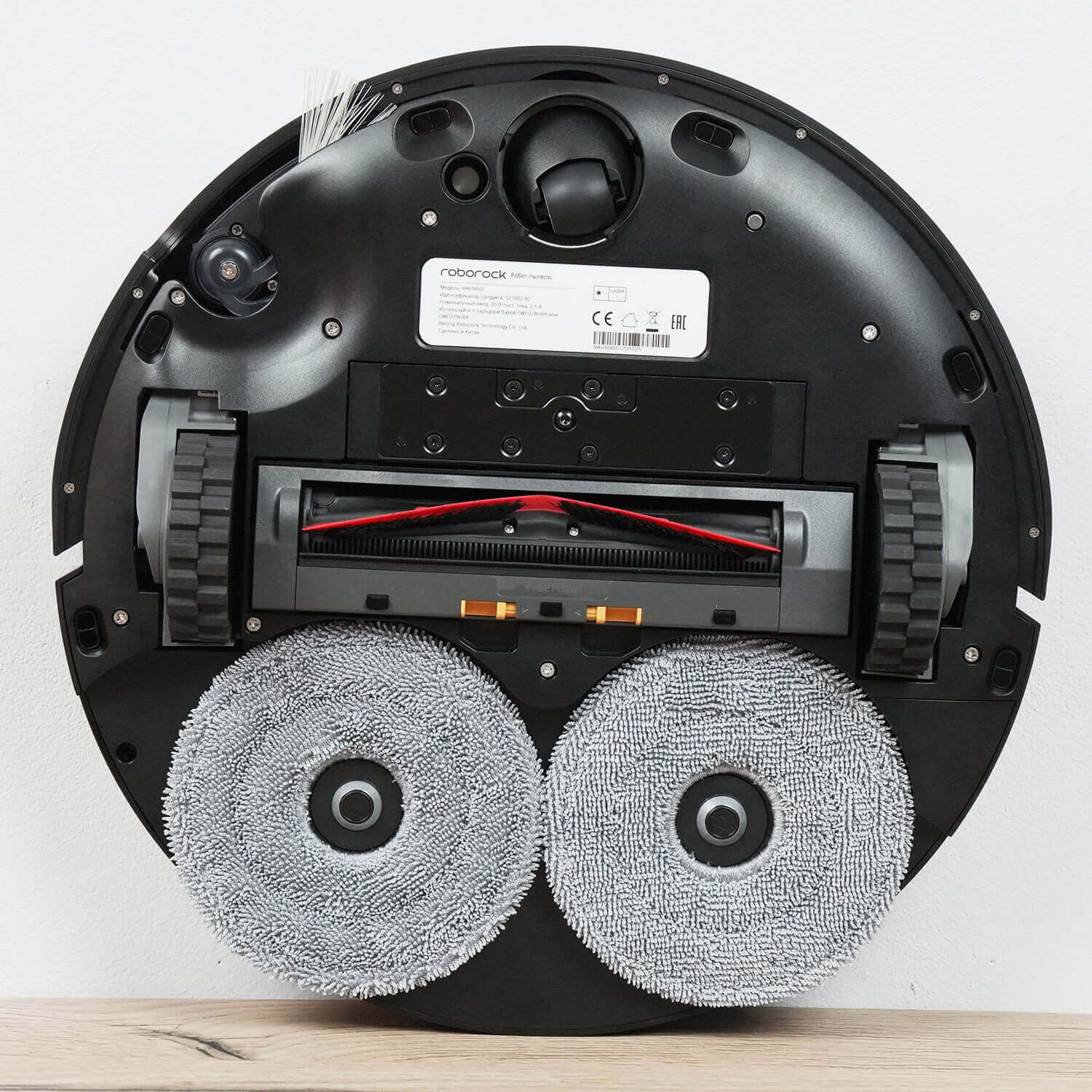
Vista inferior
A la part superior del cos hi ha dos botons de control mecànic, tres altaveus per a l'assistent "Hello, Rocky" integrat i un botó d'aturada d'emergència separat per al robot.

Tauler de control
El col·lector de pols es troba sota la coberta superior. Al costat hi ha un codi QR per connectar el robot a una xarxa Wi-Fi.

Ubicació del col·lector de pols
La capacitat del contenidor de residus és petita, aproximadament de 180 ml. El sistema de filtració és només HEPA. El dipòsit d'aigua està amagat dins del cos i té una capacitat d'aproximadament 70 ml. L'aigua es bomba automàticament a través de l'estació.

Sistema de filtració
El punt culminant del robot és el seu braç mecànic OmniGrip. Està perfectament emmagatzemat dins del cos i s'estén automàticament o manualment.

Un aspirador robòtic amb un braç mecànic per recollir objectes
Curiosament, aquesta càmera té una càmera integrada amb retroiluminació, que podeu utilitzar per controlar la vostra llar. Tenir la càmera a la mà us permet fer un millor seguiment dels detalls que necessiteu. Fins i tot podeu mirar el sostre si cal.

Càmera amb llum a la mà
El braç està equipat amb una empunyadura de goma. Pot aixecar objectes que pesen fins a 300 grams. Aquests poden incloure sabatilles, joguines o deixalles grans. Podeu definir zones específiques a l'aplicació on el robot mourà els objectes recollits, però ho explicaré amb més detall més endavant.
El mòdul de neteja consta d'un raspall lateral de doble feix que s'estén fins a les cantonades, un raspall central amb fulles i dos draps rodons de microfibra. La unitat central del raspall no només sura, sinó que també s'aixeca durant el mode de neteja del sòl i quan el robot torna a la seva estació d'inici.

Bloc de raspalls central
El raspall central està fet de truges i pètals. A l'interior, hi ha instal·lades fulles per tallar els cabells i el pelatge enredats. Aquesta solució no és única, però ja ha demostrat la seva eficàcia. Roborock anomena aquesta tecnologia FreeFlow.

Raspall amb ganivets
Darrere del raspall central hi ha dos draps rodons giratoris, un dels quals es mou cap al sòcol durant la neteja en humit.

Porta-tovallons

Mecanisme per moure el suport fins a la vora
També hi ha un sistema automàtic d'aixecament de tovallons i retirada automàtica dels portatovallons a l'estació.

Aixecar tovallons
El robot pot alliberar els seus suports per a una neteja completa en sec i neteja de catifes, i després els torna a fixar ell mateix.

Deixar tovallons a l'estació
L'elevació del cos del robot també mereix una atenció especial. Tot el cos s'aixeca automàticament quan el robot detecta obstacles alts o catifes de pèl mitjà. Això permet que el robot aspirador superi llindars de fins a 4 cm d'alçada. Aquesta tecnologia s'anomena AdaptLift.
L'estació del Roborock Saros Z70 buida automàticament el dipòsit de pols, renta els draps de neteja amb aigua calenta, els asseca amb aire calent, neteja automàticament la part inferior de l'estació amb raspadors, barreja automàticament el detergent i bomba aigua al dipòsit del robot. També compta amb una càrrega ràpida de només 2,5 hores i detecció automàtica de brutícia per als draps de neteja, cosa que permet tornar-los a rentar quan calgui.

Robot a l'estació
Roborock ofereix una estació d'acoblament independent de perfil baix per connectar-la a les canonades de clavegueram i aigua. Tanmateix, aquest aspirador robòtic no es vendrà al mercat nacional, almenys de moment, per la qual cosa els consumidors russos, malauradament, encara no tenen aquesta opció de luxe.
Vegem cada component de l'estació per separat. La rampa per a l'entrada del robot és extraïble. La safata de rentat de tovalloletes també és extraïble.

Mòduls d'estació extraïbles
Consta d'un mòdul extraïble amb pintes per netejar les tovalloletes, una safata amb raspadors i un filtre gruixut per a l'aigua bruta. Atrapa les restes grans. Curiosament, l'estació autoneteja la safata amb aigua calenta, arribant a un rècord de 80 graus Celsius. Les tovalloletes es renten a la mateixa temperatura. Després del rentat, quan el procés de neteja s'ha completat, les tovalloletes s'assequen amb aire escalfat a 55 graus Celsius.

Raspadors
Una bossa de residus de 2,5 litres es troba sota la tapa, a la part frontal. Al costat hi ha un dipòsit per barrejar automàticament detergent amb aigua neta. Aquest dipòsit té una capacitat de 590 ml.

Dipòsit de detergent i bossa de residus
Els dipòsits d'aigua es troben a la part superior. Són força amplis, amb una capacitat aproximada de 4 litres cadascun. El dipòsit d'aigua neta conté un cartutx per a la desinfecció de l'aigua.

dipòsits d'aigua
Tots els avantatges i els inconvenients del disseny es discutiran durant la revisió final. Anem endavant!
Especificacions tècniques
Les principals característiques del Roborock Saros Z70, tal com indica el fabricant:
Aspiradora robot:
- Bateria de 6400 mAh.
- Potència d'aspiració fins a 22.000 Pa.
- Capacitat del col·lector de pols ≈180 ml.
- La capacitat del dipòsit d'aigua és d'aproximadament 70 ml.
- Franja d'obstacles de fins a 40 mm.
- Dimensions del robot: 353*80 mm.
Estació:
- Dipòsit d'aigua neta: 4 l.
- Dipòsit d'aigua bruta: 4 l.
- Bossa a l'estació: 2,5 l.
- Dimensions de l'estació: 381*475*488 mm.
La potència d'aspiració ha canviat, cosa que es verificarà en proves. Els altres paràmetres romanen sense canvis.
Capacitats funcionals
Parlant de característiques, el robot aspirador es controla mitjançant l'aplicació patentada Roborock. La connexió és senzilla i convenient, la interfície és en rus i la versió russa del robot fins i tot té notificacions de veu en rus. La versió global no té un paquet de veu rus, cosa que és important tenir en compte.

Control mitjançant l'aplicació
Les funcions principals del Roborock Saros Z70 es mostren a la pantalla:
- Autoneteja del col·lector de pols a l'estació.
- Rentar tovallons a l'estació amb aigua calenta.
- Assecar tovallons amb aire calent.
- Extensió del raspall lateral a les cantonades.
- Moure el suport amb un tovalló al sòcol.
- Reomplint el dipòsit d'aigua del robot a través de l'estació.
- Barreja automàtica de detergent.
- Retirada de portatovallons a l'estació.
- Reconeixement d'objectes al terra.
- Monitorització remota de la llar mitjançant càmera.
- Control manual d'un braç mecànic.
- Desar diversos mapes de neteja a la memòria.
- Zonificació automàtica de les instal·lacions en habitacions.
- Selecció de zones i habitacions per a la neteja.
- Parets virtuals i zones prohibides (i per al mode de neteja en humit).
- Ajust de la potència d'aspiració.
- Ajust del grau d'humitació del tovalló.
- Mode d'usuari.
- Registre de neteja.
- Organitzar la neteja segons un horari.
- Augment automàtic de la potència a la catifa.
- Neteja de catifes en mode de neteja humida.
- Aixecar tovallons en conduir per sobre de catifes.
- Pujant els raspalls turbo en mode de neteja en humit.
- Aixecar el cos en superar obstacles.
- Hola, suport de Rocky.
- Notificacions de veu en rus.
- Suport de Yandex.Alice.
El control del robot a través de l'assistent de veu patentat "Hello Rocky" mereix una atenció especial. Simplement doneu una ordre al robot per veu i ell l'executa. No calen dispositius de tercers. Molt guai! Tanmateix, a la versió global, les frases es perceben en anglès, cosa que no és gaire convenient.
Control per veu
Com s'ha esmentat anteriorment, podeu monitoritzar la vostra llar de forma remota des del vostre telèfon intel·ligent a través de la càmera del robot. Fins i tot podeu canviar entre la càmera del para-xocs i la càmera de la mà del robot.
També és genial que puguis controlar manualment el braç mecànic per moure objectes. Aquest mode és interessant i es pot utilitzar per a l'entreteniment. Estic segur que no només els nens, sinó també els adults ho apreciaran.
També val la pena assenyalar que Roborock ha afegit una funció que desactiva la rotació del raspall lateral a les catifes. Això és bo, ja que el rendiment de neteja a les catifes és deficient sense que el raspall lateral giri.
Proves
Ja s'ha preparat i publicat al canal una revisió detallada en vídeo amb proves:
Navegació
I finalment, passem a les proves! Primer, provarem la navegació del Roborock Saros Z70 en una habitació amb obstacles. El robot aspirador primer navega pel perímetre de l'habitació i després neteja tota la zona accessible en un patró serpentejant. El mirall va introduir un error al mapa. Primer va intentar pujar a les potes de l'assecadora, després va donar voltes amb cura al seu voltant, després va donar voltes al voltant de les potes de la taula i la caixa, abans de tornar a la seva base.

Navegant per una sala d'obstacles
Parlant de navegar per la casa, el Roborock Saros Z70 neteja habitació per habitació, primer al llarg del perímetre i després en un patró serpentejant. Després d'un interval de temps seleccionat o després de cada habitació, el robot aspirador torna a l'estació i esbandeix els coixinets de neteja, i després torna a netejar on ho havia deixat. No hi ha zones sense netejar, la velocitat de neteja és alta i aquest model té una navegació excel·lent!
Passant per sota de mobles baixos
També vaig provar l'alçada mínima lliure del Roborock Saros Z70. Vaig poder crear una distància lliure de 85 mm i el robot la va navegar sense cap problema. Per tant, crec que pot passar per sota de mobles de fins a 8 cm de gruix, tal com s'indica als materials promocionals.

Passant per sota de mobles baixos
Autonomia
També vaig provar la durada de la bateria quan feia funcionar el robot a màxima potència amb la neteja humida activada. Va durar 109 minuts, netejant 76 metres quadrats d'espai útil. En realitat, això són gairebé dues neteges completes d'un apartament de dues habitacions de 70 metres quadrats. També inclou un mode de represa de la neteja després de recarregar-lo a la base, de manera que aquest model és capaç de netejar zones més grans.
Reconeixement d'objectes al terra
Pel que fa al sistema d'evitació d'objectes, amb bona il·luminació, el robot va ser capaç de navegar amb precisió al voltant dels sis objectes del terra, identificant-ne correctament cinc. Només va fallar a l'hora d'identificar una joguina. Tanmateix, no només va reconèixer el mitjó, sinó que també el va llençar a la paperera.
El robot va aconseguir recórrer amb cura 3 de 3 mitjons, però només en va reconèixer 2 de 3 i els va moure a la cistella.
Per alguna raó, el robot aspirador no va reconèixer cap dels quatre cables, tot i que va aconseguir evitar-ne tres amb cura. El quart es va encallar unes quantes vegades, però no va fallar.
De les sis sorpreses simulades de mascotes, el robot només va aconseguir navegar amb seguretat al voltant de cinc, dues de les quals va reconèixer. No va reconèixer una trampa i la va mossegar, després de la qual cosa va trobar un error a causa d'un raspall central bloquejat.
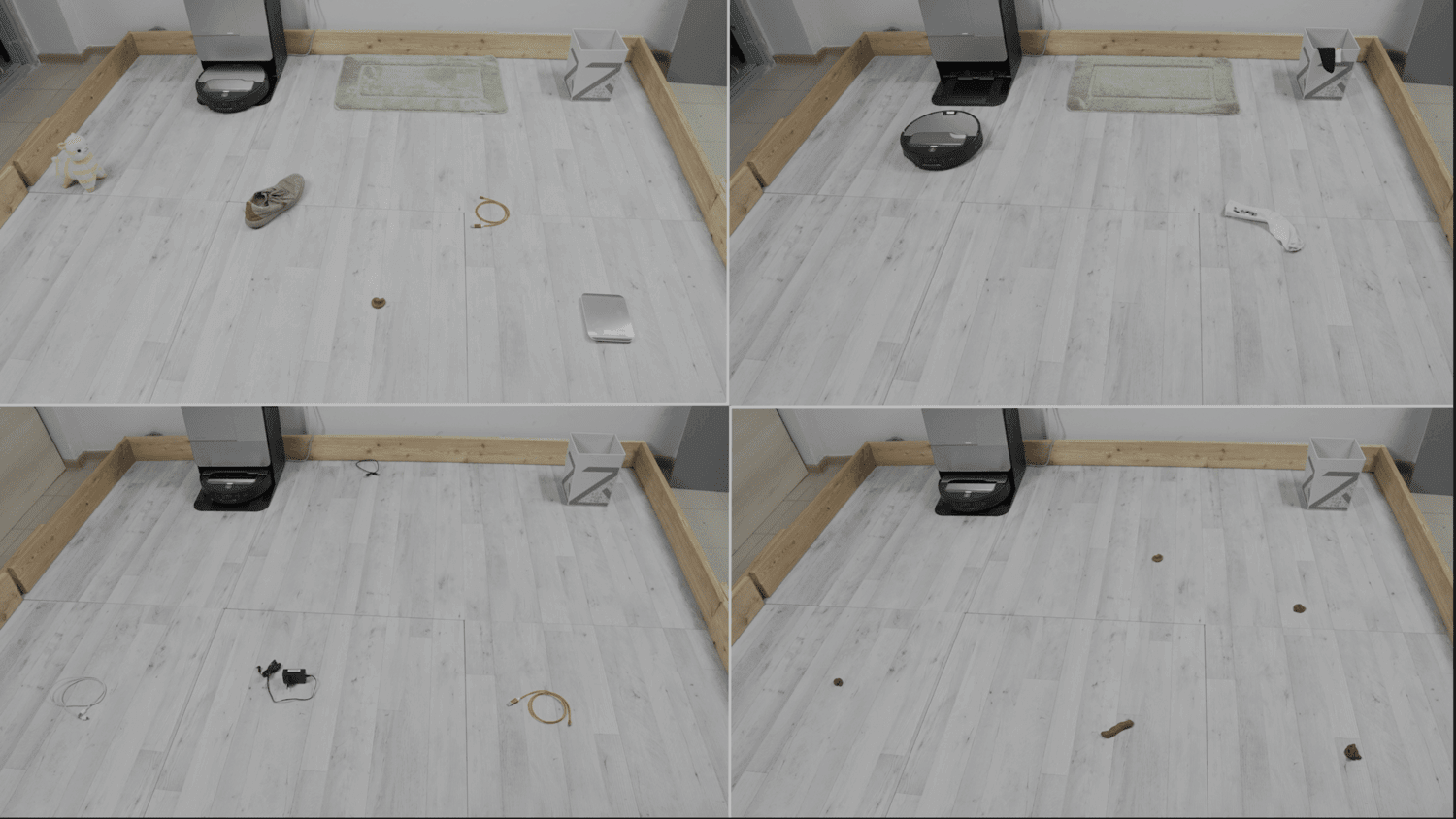
Reconeixement d'objectes en bones condicions de llum
En completa foscor, el robot va navegar per quatre dels sis objectes: un mitjó, un cordó, una sabata i una joguina. Va moure el mitjó cap a la cistella però no el va poder col·locar, deixant-lo al costat. També va moure la sabata al costat del mitjó, a una zona designada del mapa. No va reconèixer la mascota sorpresa simulada i va passar per sobre diverses vegades. Tampoc la va reconèixer i va arribar a la bàscula.
Com amb una bona il·luminació, vaig encerclar amb cura els tres mitjons, reconeixent-ne dos i traslladant-los a la cistella.
Dels quatre cables, només va aconseguir evitar-ne dos, reconeixent-ne un. El robot va mossegar els altres dos.
No obstant això, el robot va tenir un rendiment deficient a l'hora d'evitar femta simulada. Només va poder navegar amb seguretat al voltant de dues de les sis trampes i en va reconèixer tres com a mines.
Reconeixement d'objectes en la foscor completa
En general, com abans, el sistema per reconèixer i evitar objectes requereix millores.
Pel que fa al reconeixement de taques al terra, el robot aspirador va detectar la taca mentre netejava, va apagar l'aspiració i va netejar la zona tacada en mode de neteja puntual amb una doble passada. Curiosament, en el mode de neteja puntual, pressiona la part posterior dels coixinets de neteja cap avall mitjançant la tecnologia AdaptLift. Això augmenta la pressió dels coixinets al terra, millorant l'eliminació de taques. Tanmateix, el robot no va eliminar la taca; després d'una doble passada, va tornar a l'estació de neteja, va rentar els coixinets i va continuar netejant.

Reconeixement puntual
L'algoritme encara necessita alguns refinaments. Un millor enfocament seria reavaluar la zona tacada i fregar-la fins que la taca s'hagi eliminat completament.
Prova de mà
He provat algunes de les característiques de la mà per separat. Començaré dient que és molt fàcil d'utilitzar, en part gràcies a la zona d'agafada dedicada i la capacitat d'ajustar la direcció del moviment al llarg de cada eix.
Però em preguntava si el sistema de protecció funcionaria si no hi hagués prou espai lliure per sobre del braç. Per exemple, si l'objecte que es mou es detectés sota un llit o un armari. En aquest cas, la càmera superior indica al robot que no hi ha espai lliure per sobre perquè el braç funcioni. El braç no s'estén i el robot torna a l'estació. Fins i tot vaig col·locar l'objecte sota una taula de vidre transparent. El robot no va detectar el vidre, però després d'un intent, es va adonar que no podria agafar-lo i m'ho va notificar a l'aplicació. Així doncs, al meu entendre, la protecció del braç contra accidents està ben implementada.
És divertit jugar-hi. L'únic problema és que no estic segur que sigui una bona idea recollir les joguines de la teva mascota innecessàriament. Tinc la sensació que el gos li arrabassarà aquesta mà per dissuadir-la de tocar la d'una altra persona sense permís. Seria interessant escoltar els comentaris dels propietaris de Z70 sobre com reaccionen les seves mascotes a la mà en la teva situació.
Neteja darrere les cortines
També vaig comprovar si el sistema de navegació patentat pot netejar darrere de cortines i cortines, cosa que la majoria de robots lidar no poden fer. No, aquest robot, com els seus germans de la línia, no neteja darrere de cortines.
Potència de succió
La prova de potència que més em va interessar va ser la prova de potència. En mode Silenciós, el Roborock Saros Z70 només va poder netejar les restes d'un espai de 2 mm. En mode Equilibri, va millorar significativament el rendiment de neteja en l'espai de 2 mm. En mode Turbo, només va netejar parcialment l'espai de 4 mm. En mode Màxim, el robot va netejar parcialment l'espai de 10 mm. I en mode Màx.+, va millorar el rendiment de neteja en els espais de 4 i 10 mm, i també va netejar parcialment l'espai de 6 mm.

Poder
Així doncs, en realitat, el robot té una alta potència de succió i les pèrdues aerodinàmiques són menors que les dels seus predecessors. Saros 10R i S9 MaxV Ultra.
Neteja en sec
La qualitat de recollida de diversos tipus de deixalles en sòls laminats és bona, però hi ha una advertència. Les deixalles grans, com ara boletes de sorra i menjar per a mascotes en el meu cas, obstrueixen el raspall turbo, cosa que provoca un mal funcionament del robot. Sense deixalles grans, el rendiment de neteja és bo, i el robot pot fins i tot escombrar les deixalles a les cantonades gràcies a l'extensió del raspall lateral.

Neteja en sec
Veiem que el raspall central s'ha embolicat en cabells i llana, i els ganivets no han aconseguit fer front a la tasca.

Condició del raspall
Protecció capil·lar anti-embolics
També vaig provar com les fulles incorporades del raspall gestionaven l'autoneteja del pèl i del pèl d'animals. Vaig posar pèls de diferents longituds al terra. El robot els va recollir i vam veure que el raspall turbo havia enredat els pèls fortament al seu voltant, sense aconseguir tallar-los.

Protecció capil·lar anti-embolics
Al meu entendre, el disseny no és gaire efectiu, però per ser justos, les fulles fan la seva feina en un entorn domèstic. El raspall turbo està net després d'una setmana de neteja amb el robot, i val a dir que tinc un gos que perd pèl constantment i dues nenes a casa.
Neteja de catifes
El robot aspirador fa una bona feina netejant catifes, tant de pèl curt com esponjoses. Per cert, el raspall central es va tornar a bloquejar a causa del menjar.

Neteja de catifes
Autoneteja
Immediatament després de les "proves de brutícia", vaig comprovar el rendiment d'autoneteja del robot aspirador. Vam veure que el contenidor de pols estava completament ple. Vam tornar el robot a l'estació i vam iniciar el cicle d'autoneteja. Els resultats van ser bons. El contenidor de pols estava completament buit.

Autoneteja
Però no m'ha agradat el fet que el filtre HEPA s'obstrueixi amb deixalles per la manca d'una malla al davant. Els enginyers ho haurien d'arreglar!

El filtre HEPA està obstruït
Neteja humida i catifes
Quan es tracta de neteja humida en terres amb moqueta, el robot ofereix diversos modes d'interacció. Pot navegar amb cura per la catifa en mode de neteja humida o pot entrar i tocar la catifa amb el coixinet de neteja si es vol netejar amb el robot. També pot netejar catifes durant la neteja humida, aixecant automàticament els coixinets de neteja i fins i tot el cos del robot en entrar a la catifa. També pot treure automàticament els coixinets de neteja a l'estació de neteja i netejar les catifes sense ells, eliminant completament qualsevol contacte entre els coixinets de neteja humides i la pila de la catifa. Les dues últimes opcions són les més eficients.
Netejant la brutícia
El rendiment de neteja és excel·lent. Les tovalloletes pressionen fermament contra el terra i absorbeixen la brutícia. No hi ha cap zona estreta al llarg del sòcol, gràcies a que les tovalloletes s'estenen fins al sòcol. Això és un avantatge!

Netejant la brutícia
Eliminació de taques difícils
Pel que fa a l'eliminació de taques difícils, el robot va ser capaç d'eliminar fins i tot taques seques de cafè i salsa. I no al primer intent. Al sisè intent, per ser exactes. I aquest és un resultat excel·lent! I no va fer servir detergent, ja que no n'hi havia cap. La prova va ser un èxit!

Eliminació de taques difícils
Qualitat de rentat dels tovallons
M'agradaria parlar immediatament de l'efectivitat de l'estació en si. Comencem amb la qualitat de neteja de les tovalloletes. Fins i tot després de proves exhaustives, les tovalloletes tenen un aspecte significativament millor després de rentar-les a l'estació. La funció d'escalfament d'aigua sens dubte millora l'eficiència de neteja. Les tovalloletes estan realment molt calentes després de sortir de l'estació. En l'ús diari, després de rentar el terra, les tovalloletes es renten bé a l'estació. La brutícia no s'esbandeix amb la pressió de l'aigua tèbia. Això és un avantatge.
Vaig decidir comprovar la temperatura jo mateix; en el meu cas, la lectura màxima a la zona del desguàs va ser de 54,9 graus. No es poden descartar errors de mesura, depenent de la ubicació d'instal·lació del sensor i de la seva precisió, però després de rentar-les, les tovalloletes estaven realment calentes. Fins i tot vaig comprovar la temperatura de les tovalloletes i era de més de 46 graus.
La temperatura d'assecat és alta: el sensor mostrava més de 52 graus i aquest és un bon resultat!

Temperatura d'assecat per a tovallons
Manteniment de l'estació
Pel que fa al manteniment, la safata pràcticament no requereix intervenció. La part inferior es manté neta gràcies a la funció d'autoneteja, que utilitza raspadors i esbandides amb aigua calenta. En el meu cas, després d'una setmana d'ús, només quedava una petita quantitat de cabells atrapats al filtre. Però tot es treu, s'esbandeix i es torna a posar fàcilment.
franquícia d'obstacles
Un punt interessant és el creuament de llindars. El Roborock Saros Z70 pot creuar fàcilment un llindar de 2 cm, cosa que sembla obvi. Tanmateix, el robot aspirador té dificultats per creuar un llindar de 3 cm.

3 cm de distància lliure del llindar
El robot aspirador no va poder superar el llindar de 4 cm, o per ser més precisos, el llindar de 38 mm, per molt que aixequés el cos o en quins angles intentés entrar. Vaig instal·lar un llindar de dos nivells, tal com s'indica als materials promocionals, de 3 cm + 1 cm d'alçada.

Llindar de l'entrada de vehicles de 3+1 cm
Així doncs, el robot va aconseguir escalar-lo, però es va congelar i es va estavellar. Per tant, teòricament, pot superar un llindar de 3+1 cm, però tot depèn de la profunditat dels esglaons. Com més profunds siguin, més possibilitats hi haurà. Al meu entendre, la capacitat real de cross-country continua sent de 3 cm.
Conduir sobre superfícies negres
Conduir sobre catifes negres no és cap problema. El robot llisca sobre la catifa negra com si no hagués passat res.

Conduir sobre superfícies negres
Nivell de soroll
Pel que fa al nivell de soroll, oscil·la entre els 55 i els 71,3 dB, que és l'estàndard. El nivell de soroll de l'estació durant l'autoneteja és d'uns 72,5 dB, que també és un bon resultat.

Nivell de soroll
Opinió personal
El robot aspirador Roborock Saros Z70 ha estat revisat i provat a fons. Segons el nostre sistema de qualificació, ha obtingut una puntuació 247 punts, acostant-se molt al líder de la classificació Dreame X50 Ultra CompletEl robot va estar a punt de prendre el control qualificació general i tot per culpa d'una sèrie de petits comentaris.
Primer, sobre els avantatges. M'han agradat els següents:
- En primer lloc, el Roborock Saros Z70 és el primer robot aspirador produït en sèrie del món amb un braç mecànic per a la neteja de terres. Això representa un nou nivell de neteja automatitzada per a la llar. El braç fa la seva funció principal força bé, i l'aplicació indica que els algoritmes es refinaran encara més, creant nous tipus de zones de moviment d'objectes. Actualment, només s'admeten mitjons i sabates, però estic segur que s'afegiran altres tipus d'objectes i opcions d'interacció.
- El robot és més baix que els models lidar, sense comprometre la navegació. Pot entrar en zones on els robots amb una torre lidar muntada al cos no poden entrar.
- En realitat, té una alta potència de succió, cosa que s'ha confirmat en proves.
- Neteja en humit d'alta qualitat en grans superfícies. Els draps pressionen més fort el terra, eliminant les taques difícils més ràpidament. A més, el drap s'estén fins al sòcol i s'eleven sobre les catifes i fins i tot es poden deixar en una màquina de neteja en sec.
- Un sistema de reconeixement d'objectes retroil·luminat que funciona eficaçment en bones condicions de llum.
- La presència d'una estació tot en un per a l'autoneteja del col·lector de pols, el rentat i l'assecat de tovalloletes.
- L'estació actualitzada és altament eficient. Compta amb autoneteja d'alta qualitat, neteja de tovalloletes amb aigua supercalenta, assecat complet de tovalloletes amb aire calent, raspadors a la safata per a un manteniment fàcil, dipòsits espaiosos i un dispensador automàtic de detergent. En resum, és un sistema complet que fa la seva feina perfectament.
- S'ha implementat un sistema per evitar que els raspalls s'enredin amb el pèl i la pell. El raspall lateral fa la seva feina gairebé perfectament, mentre que el raspall principal encara necessita alguna millora, però ha demostrat bons resultats d'autoneteja en l'ús diari.
- Millora de la maniobrabilitat gràcies al cos elevat. El robot aspirador pot superar llindars de més de 3 cm d'alçada, una gesta que la majoria de robots similars no poden.
- El raspall lateral retràctil escombra completament les restes de les cantonades.
- Aixecant el raspall turbo i el raspall lateral en mode de neteja en humit.
- Un gran nombre de funcions a l'aplicació.
- Russificació completa en la versió per al mercat rus.
- Monitorització remota de la llar connectant-se a la càmera del robot a través d'un telèfon intel·ligent. S'ha afegit una segona càmera al braç, que permet canviar l'angle de visió de la càmera i visualitzar zones més complexes.
- Control a través de l'assistent de veu patentat Hello Rocky.
- El robot aspirador no té por de les superfícies negres.
- Muntatge d'alta qualitat i alta autoritat de marca.
- Disponibilitat de garantia i servei tècnic.
Pel que fa als desavantatges, són els següents:
- Encara no hi ha cap versió del robot al mercat amb una estació per connectar-se a les canonades de clavegueram i aigua. Al meu entendre, això és imperdonable per a un producte estrella de la marca A.
- El raspall central es bloqueja amb grans restes domèstiques. Durant les proves, que van durar més de dues setmanes, el robot va detectar un error de bloqueig del raspall turbo cinc vegades en diverses situacions. Això es deu al fet que la distància entre el raspall i el cos és molt petita.
- El sistema de reconeixement d'objectes necessita algunes millores, sobretot en la foscor completa.
- Les fulles integrades al raspall turbo no són gaire efectives. Al meu entendre, les fulles del Xiaomi i la Dreame tallen millor els pèls del raspall.
- Petit col·lector de pols.
- El filtre HEPA s'obstrueix ràpidament amb deixalles. No hi ha prou malla davant.
- El robot aspirador no pot netejar darrere de cortines i cortines, cosa que es podria implementar fàcilment per analogia amb solucions de marques de la competència.
- Preu alt.
Doncs, quina és la conclusió? La conclusió, fins i tot malgrat totes les crítiques, és que el Roborock Saros Z70 és absolutament fantàstic! L'última vegada que vaig tenir una experiència tan positiva amb un Roborock va ser allà pel 2020, quan es va llançar al mercat el robot més precís i intel·ligent d'aquell moment, el Saros Z70, pel que fa al reconeixement d'objectes. Roborock S6 MaxVIgual que fa cinc anys, Roborock ha revolucionat el mercat dels robots aspiradors oferint un enfocament de neteja fonamentalment nou. El braç robòtic és un desenvolupament eficaç i inesperat, que permet al robot netejar en llocs on un robot convencional és físicament incapaç. Això significa que el Z70 no només recollirà joguines, mitjons o sabates, sinó que també netejarà la zona on s'han guardat. Bravo, enginyers de Roborock!
I en segon lloc, hi ha una versió a la línia Roborock Saros 10R sense braç mecànic, però amb pràcticament les mateixes característiques i molt més barat!

Roborock Saros Z70 i Saros 10R
Tornant al Z70, espero que les capacitats del braç s'actualitzin i que aquest robot aspirador deleiti els propietaris amb noves funcions intel·ligents, que proporcionin una neteja automàtica més avançada. En aquest sentit, m'agradaria concloure aquesta revisió.
Si teniu cap pregunta, feu-la als comentaris. Bones compres a tothom. Adéu!







