Roborock Saros 10R (versió integrada de l'estació): com funciona tot?!

Hola a tots els lectors d'aquest projecte! En aquesta ressenya, examinarem el robot aspirador Roborock Saros 10R amb una base de connexió integrada per connectar-lo a les canonades d'aigua i clavegueram. És el primer robot aspirador Roborock del mercat que es pot connectar a les canonades de serveis públics. A més de la capacitat tècnica de connectar-se a les canonades d'aigua i desguàs, la base de connexió compta amb una mida compacta i unes capacitats d'autoneteja avançades. Aquestes inclouen l'escalfament d'aigua per rentar, l'assecat de roba amb aire calent i fins i tot la barreja automàtica de detergent. El robot aspirador també compta amb un conjunt de funcions emblemàtiques, com ara un sistema de reconeixement d'objectes precís, una potència de succió de fins a 20.000 Pa, una maniobrabilitat millorada, un cos prim i un mòdul de neteja eficaç amb protecció contra els pèls i les mascotes enredats. Tot això us costarà aproximadament 1.200 € en el moment d'escriure aquest article. A continuació, provaré a fons el robot aspirador, destacaré els seus avantatges i desavantatges i després expressaré la meva opinió. Així doncs, anem-hi!
Equipament
El robot aspirador va arribar en una caixa de marca com aquesta:

Caixa
A més del robot i l'estació, el kit inclou dos suports amb draps de neteja, un adaptador de corrent, una bossa de recanvi per a l'estació, un manual d'instruccions traduït al rus i un kit de connexió de l'estació a les línies de serveis públics. Això inclou canonades per connectar-les al subministrament d'aigua i al desguàs, una mànega perforada per ocultar les canonades, un colze de 1/2 polzada per a plàstic amb una vàlvula de bola, un filtre de malla i brides de bloqueig.

Equipament
Aspecte
Fem una ullada al disseny del Roborock Saros 10R. Aquest robot aspirador ja s'havia revisat anteriorment amb una estació amb dipòsits d'aigua estàndard. El robot aspirador en si té un disseny similar. És rodó i ve en negre.

Vista superior
El robot aspirador només fa 7,98 cm d'alçada perquè no té el lidar habitual en forma de torre.

Alçada del cos
En lloc d'un sensor lidar tradicional, el Roborock Saros 10R està equipat amb un sistema de sensors i càmeres anomenat StarSight Autonomous System 2.0. Aquest sistema combina un sistema de reconeixement d'objectes amb una llum frontal al para-xocs i sensors i càmeres al lateral, a prop de la cortina de recollida de pols autolimpiant. A més del sistema de reconeixement d'objectes, el dispositiu també compta amb una càmera activa per a la monitorització remota de la llar.

Navegació
Continuant amb els sensors, el robot està equipat amb un sensor de paret, 5 sensors de protecció contra caigudes, un nou sensor òptic que s'utilitza per evitar amb més precisió els cables al terra i un sensor de catifa.

Mòdul de neteja
A la part superior del cos hi ha dos botons de control mecànic i tres altaveus per a l'assistent "Hello, Rocky" integrat.
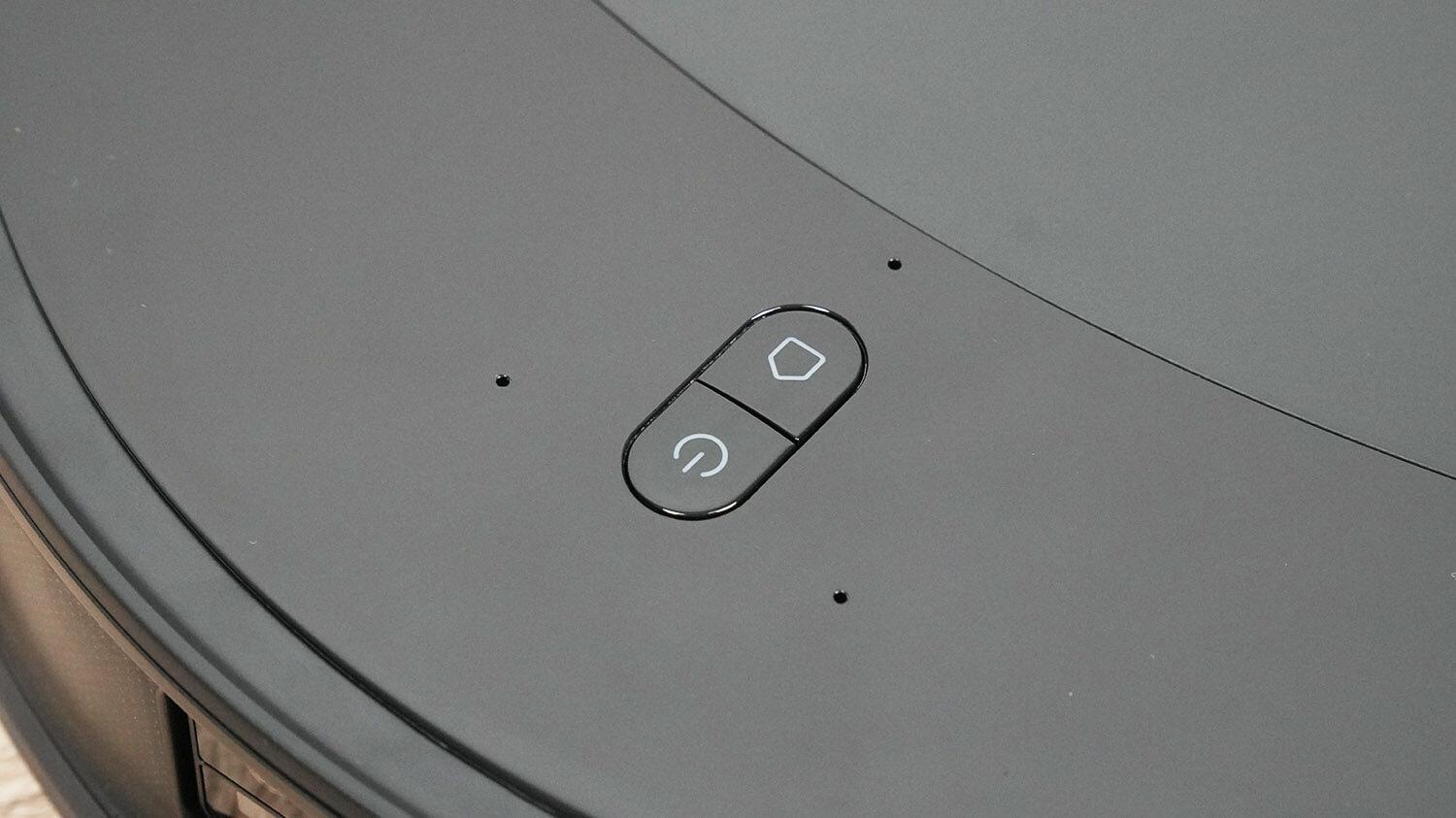
Tauler de control
El contenidor de pols es troba sota la tapa superior amb tancament magnètic. El contenidor, com el filtre, es pot rentar amb aigua. El sistema de filtració es basa en un filtre HEPA. El robot també té un dipòsit d'aigua ocult. L'aigua es bomba automàticament a l'estació.
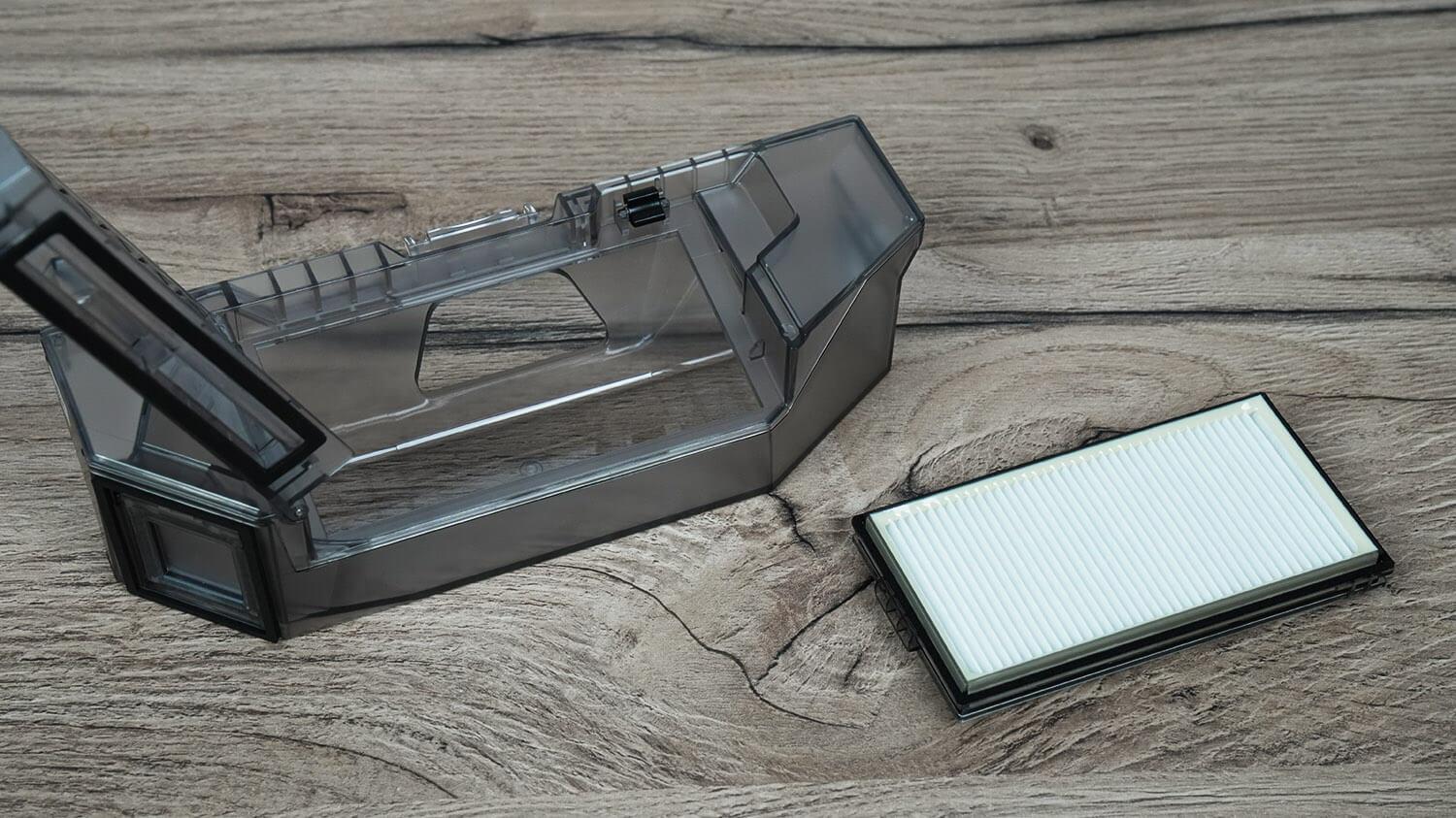
Col·lector de pols
Hi ha un únic raspall lateral de doble feix fixat amb un cargol. S'estén fins a les cantonades per escombrar les restes i s'aixeca automàticament quan entra a les catifes, durant la neteja del terra i quan el robot torna a la seva estació d'inici.

raspall lateral
El pinzell central consta de dues parts: dos mitges pinzells de pètals de truges amb un espai al centre entre ells.

raspall central
La unitat de raspall és flotant. Cada secció es desmunta. Els cabells i el pèl es recullen a través de l'obertura. El raspall turbo puja durant la neteja del terra i quan el robot aspirador torna a la seva estació.
Darrere del raspall central hi ha dos draps rodons giratoris, un dels quals es mou cap al sòcol durant la neteja en humit.
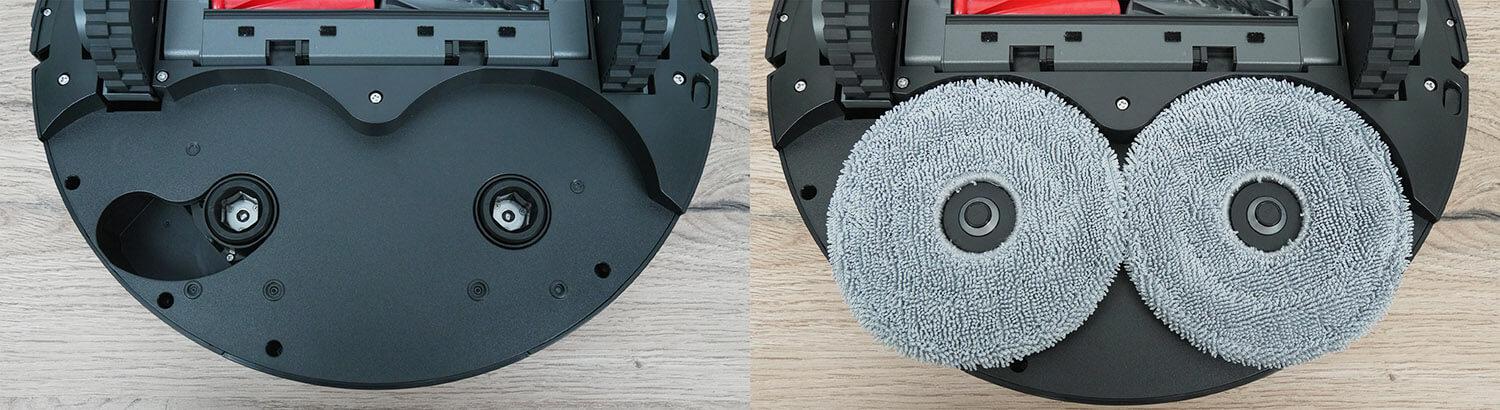
Tovallons
El robot també disposa d'elevació i retirada automàtica dels suports dels eixugaparabrises a l'estació. El robot pot alliberar els suports per a una neteja completa en sec i neteja de catifes, i després els torna a col·locar automàticament.
Restablir tovallons
L'elevació del cos del robot també mereix una atenció especial. Tot el cos s'aixeca automàticament quan el robot detecta obstacles alts o catifes de pèl mitjà. Això permet que el robot aspirador superi llindars de fins a 4 cm d'alçada. Aquesta tecnologia s'anomena AdaptLift.
I ara la part més interessant: l'estació. Primer, podeu comparar les dimensions de la versió integrada amb l'estació estàndard utilitzant el robot Xiaomi com a exemple. La diferència de mida és notable.

Estació integrada i estàndard
L'alçada integrada és de només 300 mm, cosa que permet instal·lar-la fins i tot dins d'un armari de cuina. L'amplada i la profunditat són de 381 i 475 mm, respectivament.

Estació
A l'estació Roborock Saros 10R, l'aspiradora buida automàticament el dipòsit de pols, renta els draps de neteja amb aigua calenta, asseca amb aire calent, neteja la part inferior de l'estació amb els seus rascadors, barreja automàticament el detergent i bomba aigua al dipòsit del robot. El robot també compta amb una càrrega ràpida en només 2,5 hores i detecció automàtica de brutícia per netejar els draps de neteja, permetent tornar-los a rentar quan calgui.
Vegem cada component de l'estació per separat. La rampa d'accés del robot és extraïble. La safata de rentat de les tovalloletes també és extraïble. Consta d'un mòdul extraïble amb pintes per netejar les tovalloletes, una safata amb raspadors i un filtre gruixut per a l'aigua bruta. La temperatura de l'aigua de rentat arriba als 80 graus Celsius. Després del rentat, les tovalloletes s'assequen a l'aire escalfat a 55 graus Celsius.

Mòduls d'estació extraïbles
Hi ha una bossa de deixalles situada sota la tapa, a la part frontal. És un disseny estàndard. Al costat hi ha un dipòsit per barrejar automàticament detergent amb aigua neta. Aquest dipòsit té una capacitat de 590 ml.

Detergent i bossa d'escombraries
Un inconvenient és la manca d'accés al sistema d'entrada/drenatge d'aigua. La revisió incloïa estacions integrades que tenien accés a un dipòsit intermedi d'aigua bruta on es podia netejar la malla de calç. El manteniment manual no és possible aquí, i això no és una bona idea. L'experiència demostra que aquestes estacions encara requereixen un manteniment periòdic dels dipòsits interns.
A la part posterior de l'estació, hi ha sortides per connectar canonades. Es poden col·locar en qualsevol direcció, depenent de la disposició dels serveis en condicions individuals.

Vista de l'estació des de darrere
Tots els avantatges i els inconvenients del disseny es discutiran durant la revisió final. Anem endavant!
Especificacions tècniques
Les principals característiques del Roborock Saros 10R, tal com indica el fabricant:
Aspiradora robot:
- Bateria de 6400 mAh.
- Potència d'aspiració fins a 20.000 Pa.
- Capacitat del col·lector de pols ≈350 ml.
- La capacitat del dipòsit d'aigua és d'aproximadament 80 ml.
- Franja d'obstacles de fins a 40 mm.
- Dimensions del robot: 353*80 mm.
Estació:
- Bossa a l'estació: 2,5 l.
- Dipòsit de detergent: 590 ml.
- Dimensions de l'estació: 381*475*300 mm.
Aquí, només ha canviat l'altitud de l'estació, en comparació amb la versió normal del Saros 10R.
Capacitats funcionals
Parlant de característiques, el robot aspirador es controla mitjançant l'aplicació patentada Roborock. La connexió és senzilla i convenient, la interfície és en rus i la versió en rus del robot, com la meva, fins i tot té indicacions de veu en rus. La versió global no té un paquet de veu en rus, i això és important tenir-ho en compte.

Control mitjançant l'aplicació
Les funcions principals del Roborock Saros 10R es mostren a la pantalla:
- Autoneteja del col·lector de pols a l'estació.
- Rentar tovallons a l'estació amb aigua calenta.
- Assecar tovallons amb aire calent.
- Extensió del raspall lateral a les cantonades.
- Moure el suport amb un tovalló al sòcol.
- Reomplint el dipòsit d'aigua del robot a través de l'estació.
- Barreja automàtica de detergent.
- Retirada de portatovallons a l'estació.
- Reconeixement d'objectes al terra.
- Monitorització remota de la llar mitjançant càmera.
- Desar diversos mapes de neteja a la memòria.
- Zonificació automàtica de les instal·lacions en habitacions.
- Selecció de zones i habitacions per a la neteja.
- Parets virtuals i zones prohibides (i per al mode de neteja en humit).
- Ajust de la potència d'aspiració.
- Ajust del grau d'humitació del tovalló.
- Mode d'usuari.
- Registre de neteja.
- Organitzar la neteja segons un horari.
- Augment automàtic de la potència a la catifa.
- Neteja de catifes en mode de neteja humida.
- Aixecar tovallons en conduir per sobre de catifes.
- Pujant els raspalls turbo en mode de neteja en humit.
- Aixecar el cos en superar obstacles.
- Hola, suport de Rocky.
- Notificacions de veu en rus.
- Suport de Yandex.Alice.
El control del robot a través de l'assistent de veu "Hello Rocky" de l'empresa mereix una atenció especial. Simplement doneu una ordre al robot per veu i ell l'executa. No calen dispositius de tercers. Molt guai!
En general, s'ha implementat una àmplia gamma d'opcions per a una personalització flexible dels paràmetres de neteja que s'adaptin a les vostres necessitats. Això és un avantatge!
Proves
Ja s'ha preparat i publicat al canal una revisió detallada en vídeo del Roborock Saros 10R, que inclou totes les proves:
Connexió a xarxes de serveis públics
Unes paraules sobre com vaig instal·lar l'estació. Com que faig servir una unitat integrada d'una altra marca, ja tenia una ranura als armaris de la cuina. També hi ha una presa de corrent per connectar l'estació a la font d'alimentació.
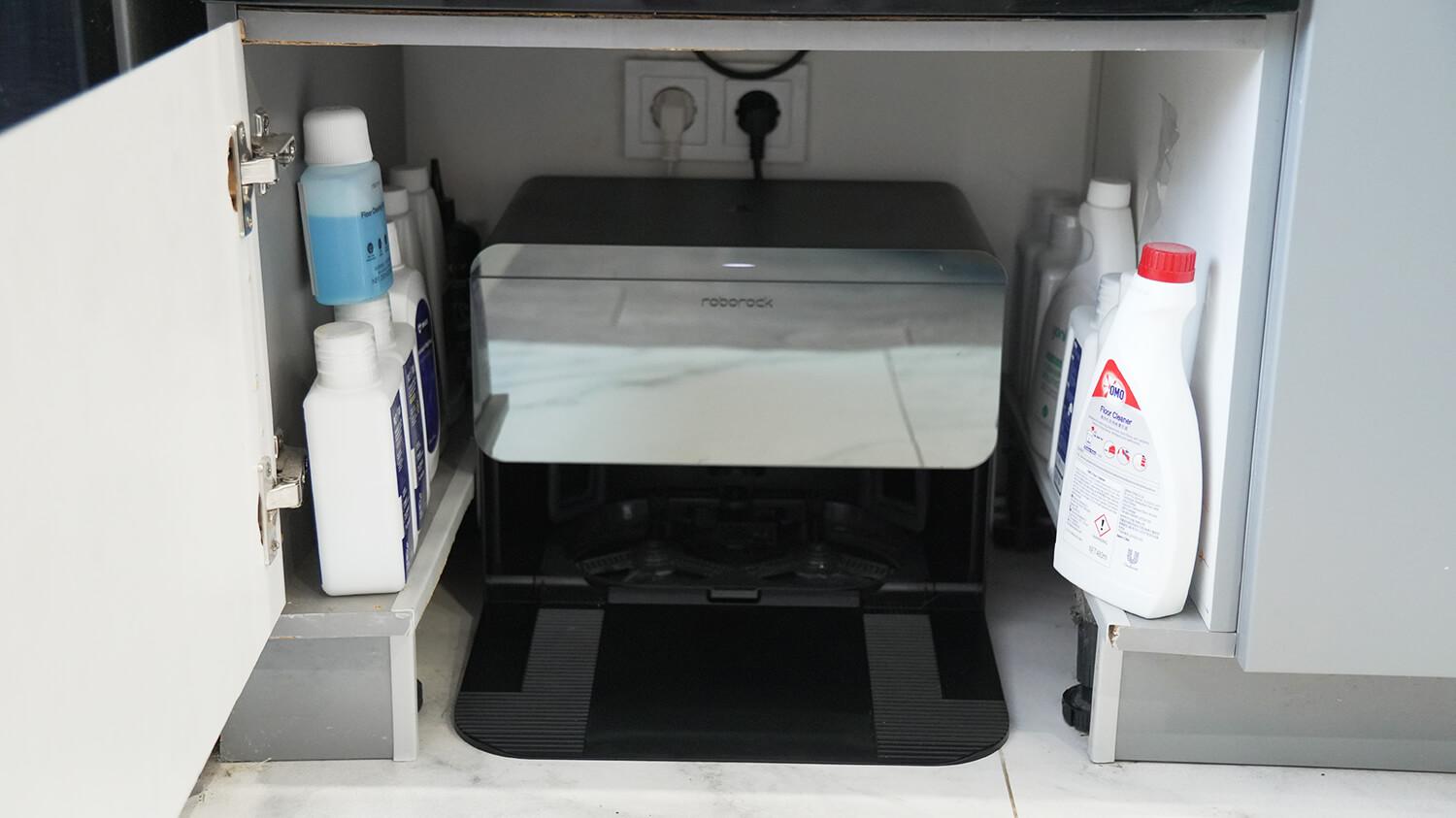
Col·locació de l'estació
Vaig connectar els tubs a l'estació, instal·lant anells de retenció.
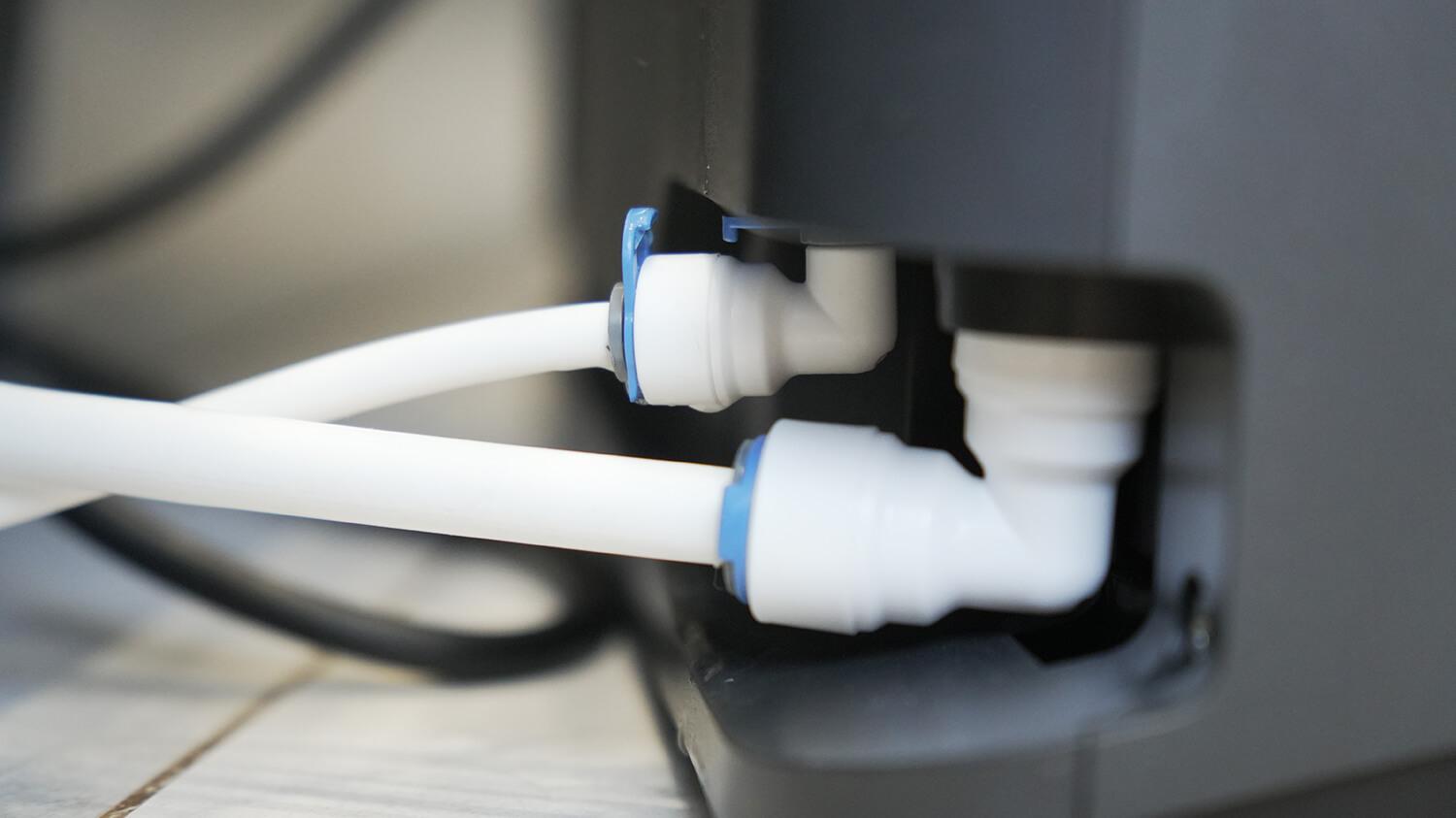
Connexió de l'estació a la xarxa d'aigua i clavegueram
Vaig connectar l'estació al subministrament d'aigua a través d'un sistema de filtració estàndard tipus Geyser sota l'aigüera. La pressió de sortida de l'aigua és suficient perquè el sistema funcioni correctament. Per cert, el fabricant indica una pressió mínima de 0,1 MPa (megaPascal).

Guèiser
Vaig instal·lar el desguàs a través d'una connexió en T instal·lada sota la pica. Vaig comprar un tap per a la connexió en T, hi vaig perforar un forat del diàmetre adequat, hi vaig inserir el tub i el vaig segellar amb segellador. El fabricant recomana connectar el tub al desguàs a no més de 50 cm del terra.

Escórrer
No he trobat cap secció a l'aplicació per diagnosticar si l'estació estava connectada correctament. Ho vaig provar la primera vegada amb el subministrament d'aigua apagat i va aparèixer una notificació corresponent amb un codi d'error. Vaig tornar a obrir l'aigua i l'estació va esbandir les tovalloletes correctament i després va buidar l'aigua al clavegueram.
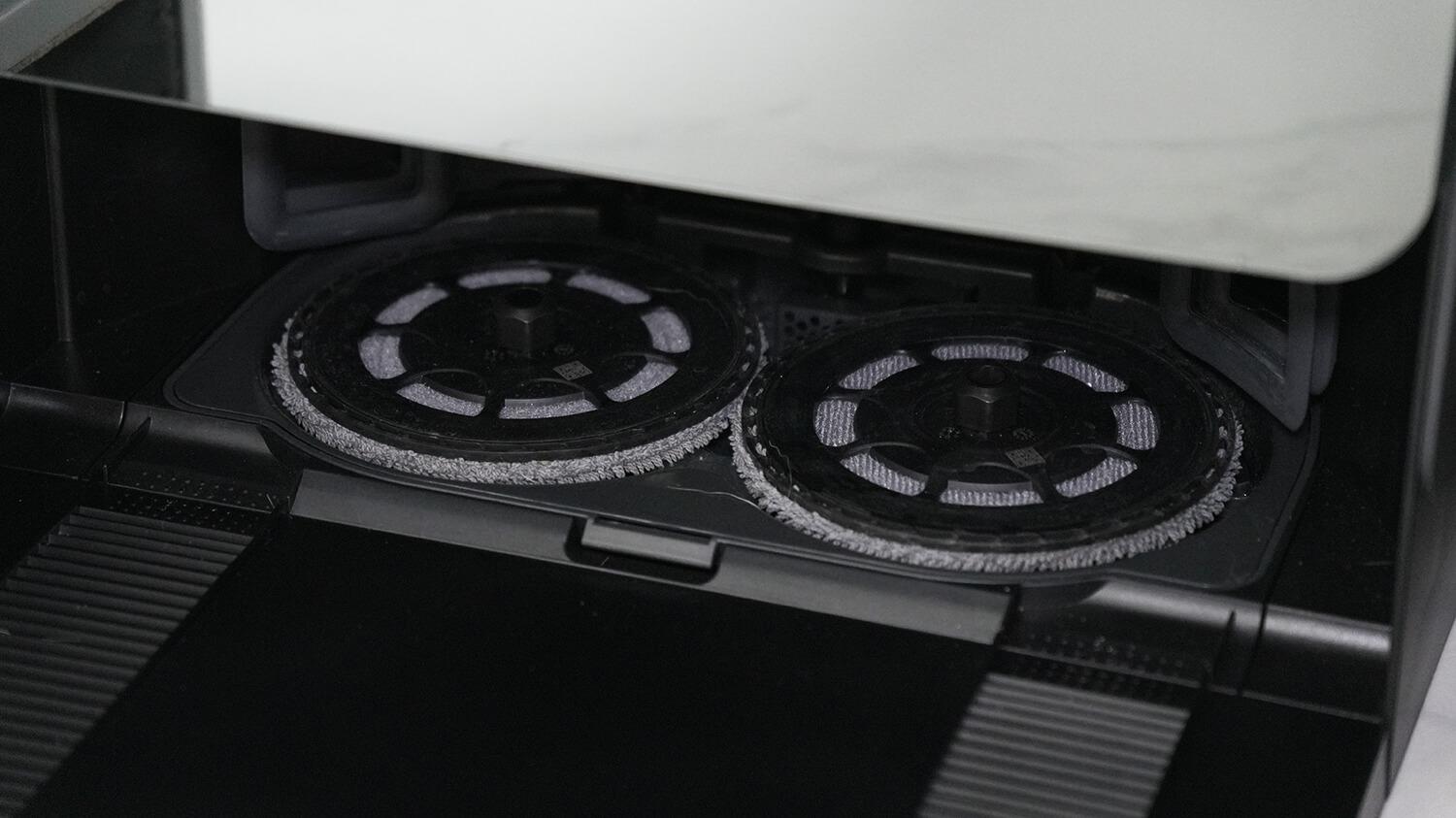
Engeguem el robot, i aquí teniu un exemple visual del Roborock Saros 10R sortint d'un nínxol a l'armari de la cuina. Al meu entendre, és una solució molt interessant.
Navegació
I finalment, passem a les proves! Primer, provarem la navegació del Roborock Saros 10R en una habitació amb obstacles. El robot aspirador primer va navegar al voltant de les potes de la taula, després al voltant del perímetre de l'habitació i, a continuació, va procedir a netejar tota la zona accessible en un patró serpentejant. El robot va navegar amb cura al voltant de les potes de l'assecadora i també va escombrar la caixa. El mirall va introduir alguns errors de mapatge, un problema comú amb la majoria de robots aspiradors. En general, el rendiment del robot va ser impecable i no hi va haver zones sense netejar, de manera que la prova va ser un èxit.
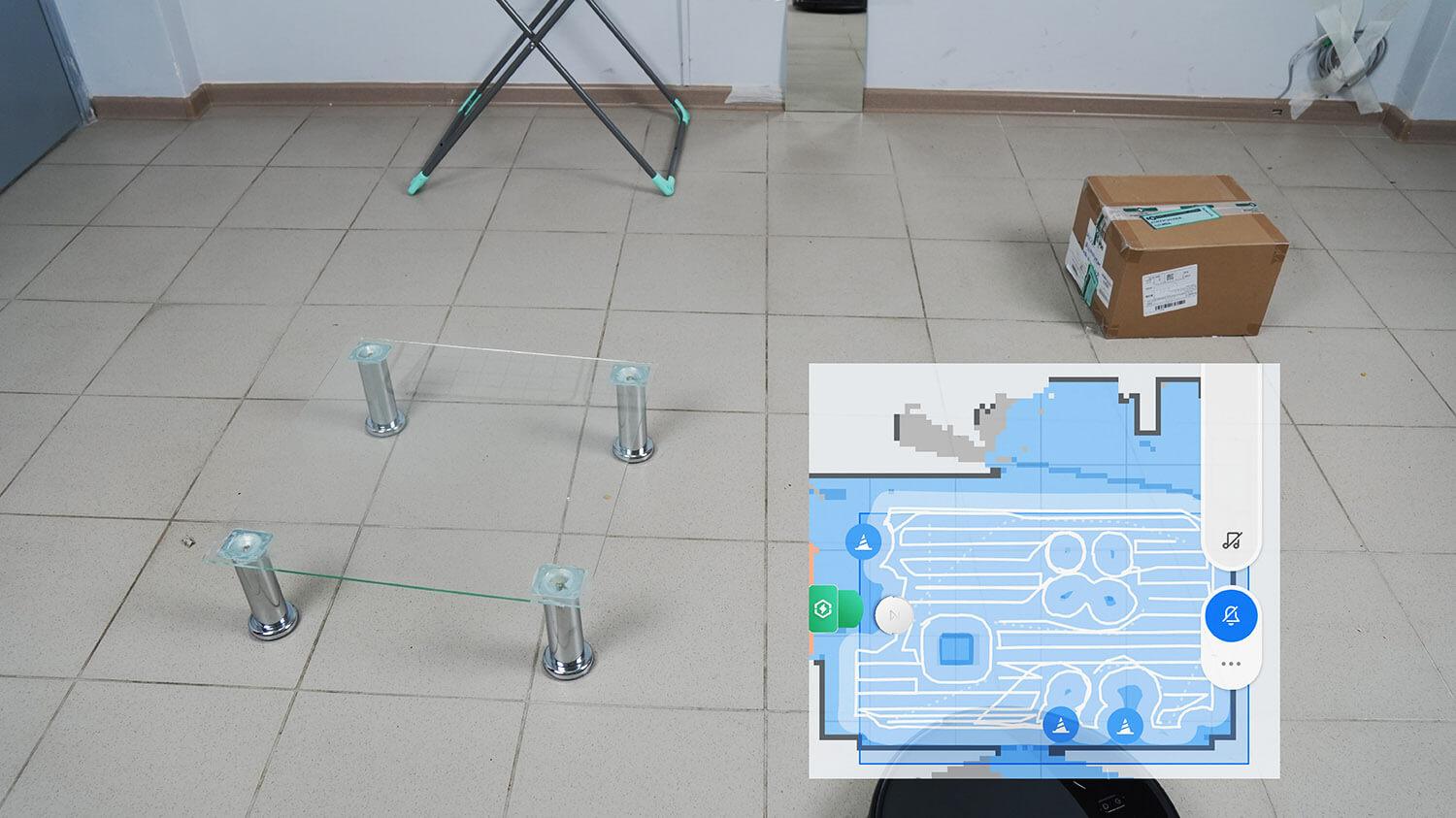
Navegant per una sala d'obstacles
Parlant de navegar per la casa, el Roborock Saros 10R neteja habitació per habitació, primer al llarg del perímetre i després en un patró serpentejant. Després d'un interval de temps seleccionat o després de cada habitació, el robot aspirador torna a l'estació i esbandeix els coixinets de neteja, i després torna a netejar on ho havia deixat. No hi ha zones sense netejar, la velocitat de neteja és alta i aquest model té una navegació excel·lent!
Passant per sota de mobles baixos
També es va provar l'alçada mínima lliure del Roborock Saros 10R. El robot va entrar a l'alçada lliure de 80 mm sense problemes i va netejar uniformement. Cap queixa sobre el robot en aquest sentit!

Distància lliure de 8 cm

Navegant per la neteja de mobles
Autonomia
L'autonomia del robot ja s'havia provat prèviament durant una revisió d'un model amb una estació d'acoblament estàndard. Va aconseguir funcionar durant 122 minuts, netejant 88 metres quadrats d'espai útil. En realitat, això són més de dues neteges completes d'un apartament de dues habitacions i 70 metres quadrats. També compta amb un mode de represa de la neteja després de recarregar-se a l'estació d'acoblament, cosa que fa que aquest model sigui capaç de netejar zones més grans.
Reconeixement d'objectes al terra
Pel que fa al sistema de detecció d'objectes, el vaig tornar a provar, ja que ha passat gairebé un any des del llançament del Saros 10R normal, i hi ha hagut moltes actualitzacions de firmware, que probablement han millorat la precisió del reconeixement d'objectes.
Amb bona il·luminació, el robot va ser capaç d'identificar correctament i desplaçar-se amb seguretat al voltant de 6 de 6 objectes a terra, fins i tot reconeixent una joguina com una mascota. També va ser capaç de desplaçar-se amb precisió al voltant de 3 de 3 mitjons, els 4 cables i 6 de 6 sorpreses de mascotes simulades, identificant correctament 3 trampes.

Caminar al voltant d'objectes amb bona llum
En completa foscor, el sistema de detecció queda encegat, però no significativament. El robot va ser capaç d'evitar 5 de 6 objectes estàndard, identificant-ne correctament 3. Igual que fa un any, va tornar a topar amb una trampa sorpresa per a mascotes, passant-hi per sobre. També va evitar 4 de 4 cables a terra, identificant-ne només 3 correctament. Va evitar amb cura 3 de 3 mitjons, identificant-ne 2. I la part més difícil: en la foscor, va evitar 1 de 6 trampes d'imitació de femta, identificant-ne una com un simple obstacle, la segona com a tela i la tercera com un moble de TV. Al meu entendre, el sistema de reconeixement d'objectes només s'ha millorat mínimament. El robot encara es va trobar amb les mateixes trampes que fa un any.

Travessar objectes en la foscor completa
La funció de reconeixement de taques al terra mereix una atenció especial. En el meu cas, hi havia una taca de quètxup sec, un bassal de llet i un bassal d'aigua neta. La càmera no va reconèixer l'aigua, però sí que va detectar la llet. En aquesta situació, el robot apaga la succió, aixeca els raspalls i passa pel bassal en un patró creuat, netejant-lo amb draps. Sorprenentment, després de netejar el bassal, no es va molestar a rentar els draps; simplement va continuar netejant. Encara més sorprenent va ser que no va reconèixer la taca, tot i que tenia un alt contrast i era força gran.

Reconeixement de bassals
Per experiència, puc dir que el sistema de reconeixement d'objectes és realment molt precís, a l'alçada dels anàlegs premium, però encara necessita algunes millores. Els enginyers de la marca encara tenen marge de millora.
Neteja darrere les cortines
També vaig comprovar si el nou sistema de navegació pot netejar darrere de cortines i cortines, cosa que la majoria de robots lidar no poden fer. No, aquest robot, com els seus germans de la línia, no neteja darrere de cortines.
Potència de succió
Per assegurar-me'n, vaig tornar a comprovar la potència de succió. Com s'esperava, els resultats no van canviar. En el mode Silenciós, el Roborock Saros 10R només va poder netejar les restes d'un espai de 2 mm. En el mode Equilibri, va netejar parcialment un espai de 4 mm. En el mode Turbo, els resultats no van canviar. En el mode Màxim, el robot va netejar millor les esquerdes de 2 i 4 mm de profunditat. I en el mode Màx+, va netejar parcialment les esquerdes de 6 i fins i tot 8 mm de profunditat.

Potència de succió
Així doncs, la potència d'aspiració augmenta realment, però les pèrdues aerodinàmiques encara són notables. Per exemple, el Roborock Qrevo S més petit, revisat anteriorment, va ser capaç de netejar un espai de 10 mm a 7000 Pa.
Neteja en sec
El rendiment de recollida del robot en terres laminats és excel·lent, fins i tot per a restes de textures variables. Gràcies al seu raspall lateral retràctil, fins i tot va aconseguir netejar les restes a les cantonades.

Neteja en sec
És interessant que el robot sigui capaç d'escombrar acuradament no només les cantonades internes sinó també les externes.

Escombrant a les cantonades
M'agradaria destacar que els raspalls centrals i laterals estan nets. Com sempre, bravo als enginyers de Roborock! La prova ha estat un èxit!

Estat del mòdul de neteja
Protecció capil·lar anti-embolics
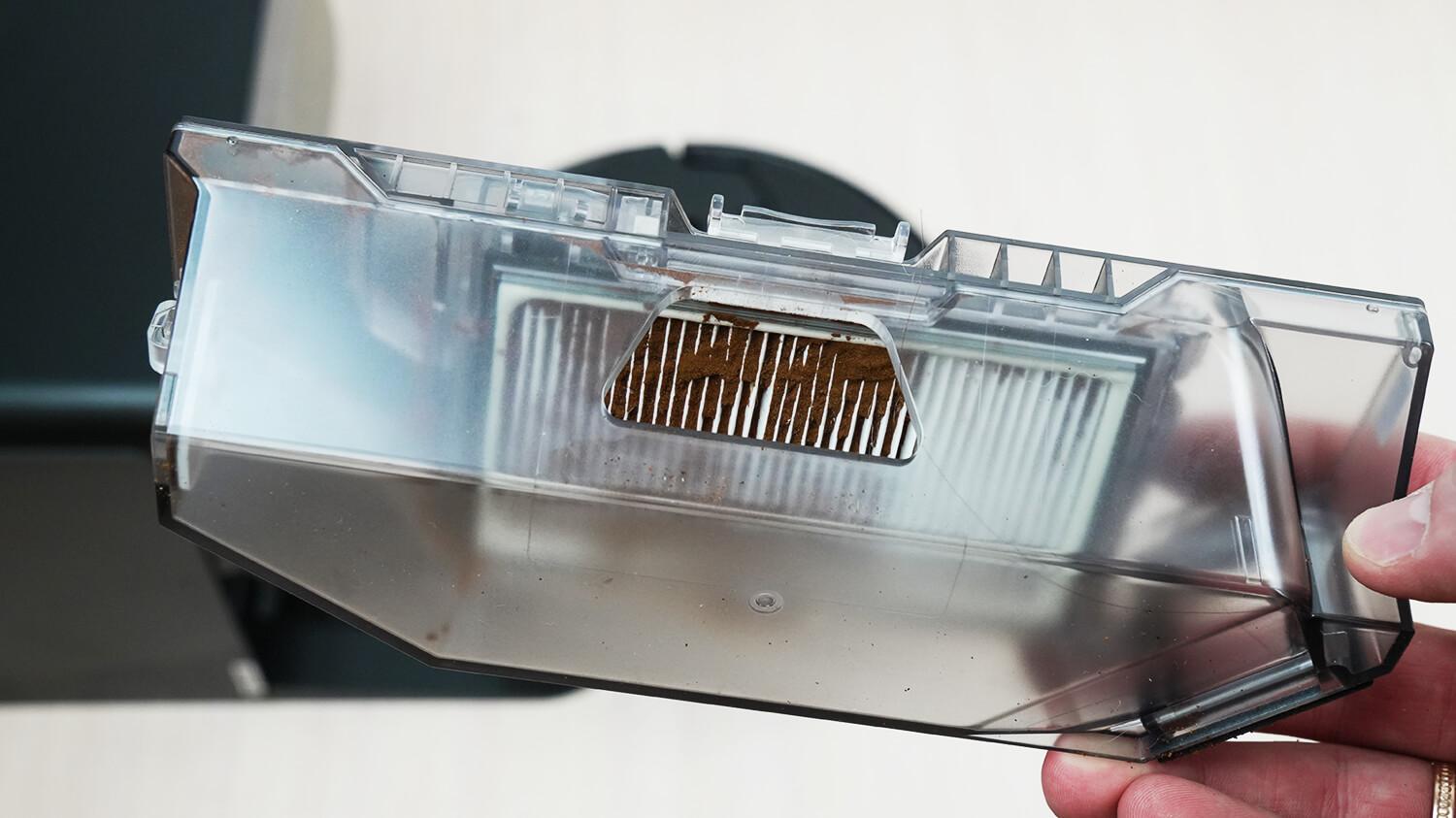
També vaig provar el raspall turbo per veure com s'encarrega de treure els cabells enredats. Aquí veiem que els cabells s'enreden més a prop del centre del raspall, mentre que els costats estan nets. Això vol dir que quan el raspall gira, dirigeix els cabells cap a l'obertura i els allibera al col·lector de pols. És només que la gran quantitat de cabells s'ha agrupat i s'ha quedat enganxada.

Protecció capil·lar anti-embolics
En un entorn domèstic, després d'una setmana de neteja, els raspalls laterals i centrals estan completament nets; realment fan una feina eficaç eliminant el pèl i el pèl! A més, el pis el comparteixen dues noies i un corgi que perd pèl perpètuament.
Neteja de catifes
El rendiment de neteja de catifes del robot és excel·lent. Això s'aplica tant a catifes de pèl curt com de pèl mitjà. Hi va haver un mínim de residus atrapats a la pila, però els resultats són excel·lents en comparació amb productes similars!

Neteja de catifes
Autoneteja
Immediatament després de les "proves de brutícia", vaig comprovar com de bé s'autonetejava el robot aspirador. El vaig tornar a l'estació i vaig començar la rutina d'autoneteja. Els resultats van ser bons.
Autoneteja
Neteja humida i catifes
Quan es tracta de neteja humida en terres amb moqueta, el robot ofereix diversos modes d'interacció. Pot navegar amb cura per la catifa en mode de neteja humida o pot entrar i tocar la catifa amb el coixinet de neteja si es vol netejar amb el robot. També pot netejar catifes durant la neteja humida, aixecant automàticament els coixinets de neteja i fins i tot el cos del robot en entrar a la catifa. També pot treure automàticament els coixinets de neteja a l'estació de neteja i netejar les catifes sense ells, eliminant completament qualsevol contacte entre els coixinets de neteja humides i la pila de la catifa. Les dues últimes opcions són les més eficients.

Neteja humida i catifes
Netejant la brutícia
El rendiment de neteja és excel·lent. Les tovalloletes pressionen fermament contra el terra i absorbeixen la brutícia. No hi ha cap zona sense rentar al llarg dels sòcols, gràcies a l'extensió de l'eixugador. Això és un avantatge!

Netejar el terra de la brutícia
També he comprovat els punts cecs de les cantonades exteriors i interiors per separat. Aquí també veiem que la cantonada exterior no es neteja completament, deixant un petit punt cec d'un parell de centímetres d'amplada. El punt cec és més gran a les cantonades interiors, ja que la tela físicament no pot encaixar bé a la cantonada.
També vaig provar com el robot neteja el terra al voltant de les potes de la cadira. Podem veure que el drap de neteja s'estén, però no neteja aquestes zones perfectament. Els enginyers de la marca encara tenen feina per fer.

Netejant al voltant de les cadires
Eliminació de taques difícils
Pel que fa a les taques difícils, el robot va ser capaç d'eliminar fins i tot les taques seques de cafè i salsa. Va eliminar la majoria de les taques en sis passades i se'n va eliminar una altra després de nou passades. No obstant això, encara considerem que el resultat són sis passades, ja que el Saros 10R, que s'havia provat anteriorment amb una estació estàndard, també va aconseguir el mateix resultat.
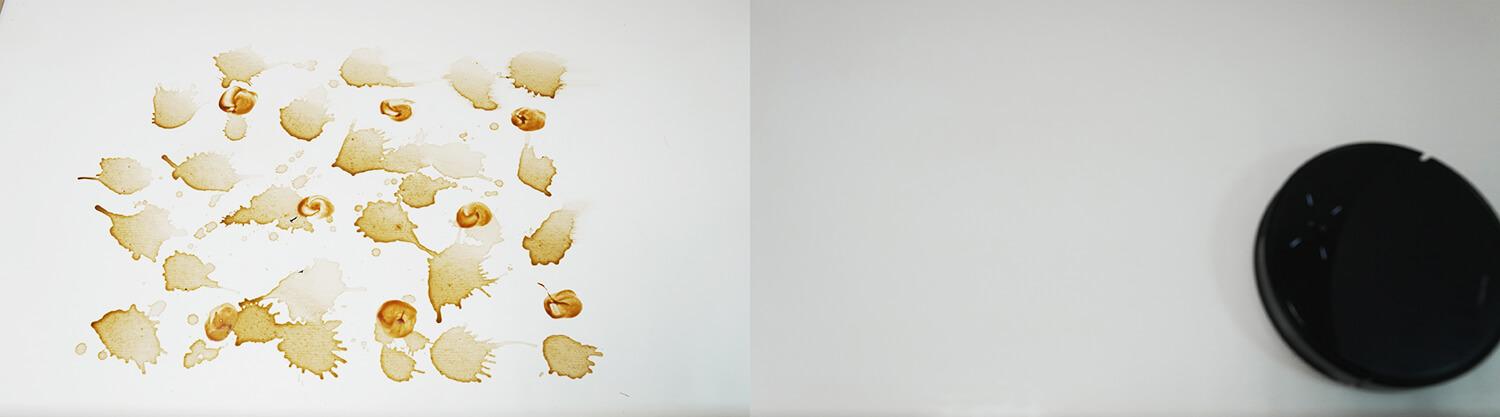
Eliminació de taques
El resultat va ser un dels millors, en comparació amb productes similars revisats. A més, no es va utilitzar detergent, ja que no estava inclòs. La prova es va superar amb èxit!
Qualitat de rentat dels tovallons
M'agradaria parlar immediatament de l'eficiència de l'estació en si. Comencem per la qualitat del rentat de les tovalloletes. Fins i tot després de proves exhaustives, les tovalloletes tenen un aspecte significativament millor després de rentar-les amb l'estació. La funció d'escalfament d'aigua sens dubte millora l'eficiència del rentat.
En un entorn domèstic, després de rentar el terra, les tovalloletes s'esbandeixen a fons a l'estació. No es va detectar cap contaminació visible.
Vaig decidir provar la temperatura de rentat jo mateix; en el meu cas, la temperatura màxima a la zona de rentat de tovallons va ser de 76,1 graus, i aquest és un resultat molt bo, tenint en compte les pèrdues i els errors de mesura!

Temperatura de rentat per a tovallons
Després del rentat, la temperatura de les tovalloletes arriba als 42,4 graus, i aquest també és un resultat excel·lent.

Temperatura dels tovallons després del rentat
La temperatura d'assecat de les tovalloletes després del rentat supera els 55 graus, que és fins i tot més alta del que s'indica. Cap queixa sobre l'estació!

Temperatura d'assecat per a tovallons
Manteniment de l'estació
L'estació en si és fàcil de netejar. Activem un mode especial en què l'estació neteja automàticament la part inferior amb raspadors. Un cop finalitzat aquest procés, podeu treure manualment el desguàs i la safata dels tovallons i esbandir-los a l'aigüera. Bàsicament, és un procés senzill.
Pel que fa a la manca d'accés als dipòsits integrats de l'estació, fins i tot la vaig desmuntar per veure com estava tot organitzat a l'interior i si l'estació necessitava algun manteniment. El dipòsit d'aigua neta és accessible després de treure les cobertes protectores, però el dipòsit d'aigua bruta és completament inamovible.
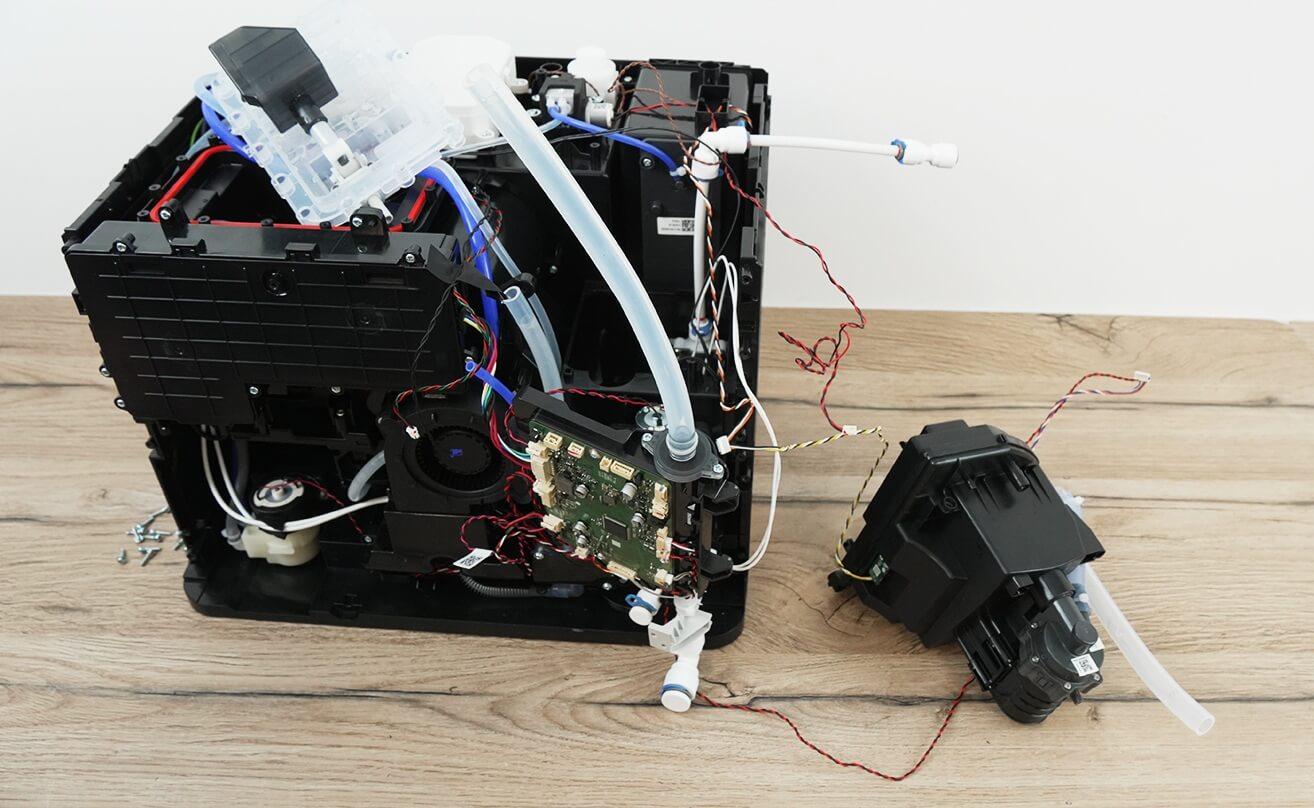
Dipòsit no desmuntable per a aigua bruta
Això vol dir que tota la placa de l'interior, que inevitablement s'acumularà amb el temps, no es pot netejar ni tan sols a mà. Això no és bo.
franquícia d'obstacles
Un punt interessant és creuar els llindars. El Roborock Saros 10R pot creuar fàcilment un llindar de 2 cm, cosa que sembla obvi. Tanmateix, el robot aspirador té dificultats per creuar un llindar de 3 cm.
El robot aspirador no va aconseguir creuar el llindar de 4 cm, o més exactament, el llindar de 38 mm, per molt que aixequés el cos o en quins angles intentés entrar. Tanmateix, amb un llindar de dos nivells, 2 cm a cada nivell, en la meva configuració, el robot va aconseguir superar l'obstacle després de diversos intents. No obstant això, una vegada fins i tot es va quedar encallat al llindar i es va estavellar. En qualsevol cas, la seva maniobrabilitat és millor que la de molts models del mercat.

franquícia d'obstacles
Conduir sobre superfícies negres
Conduir sobre catifes negres no és cap problema. El robot llisca sobre la catifa negra com si no hagués passat res.

Conduir sobre superfícies negres
Nivell de soroll
Pel que fa als nivells de soroll, oscil·len entre els 56,5 i els 66,1 dB, depenent del mode de funcionament seleccionat. El nivell de soroll del robot és realment molt baix, sobretot tenint en compte la seva major potència de succió. El nivell de soroll de l'estació durant l'autoneteja és d'uns 72 dB. Aquest també és un bon resultat.

Nivell de soroll
Opinió personal
El robot aspirador Roborock Saros 10R amb base d'acoblament integrada ha estat revisat i provat a fons. Segons el nostre sistema de qualificació, ha obtingut una puntuació... 241 punts, 2 punts per davant de la versió Saros 10R amb dipòsits convencionals. Amb aquest resultat, el robot aspirador va entrar al TOP-10 dels millors del projecte robovac.washerhouse.com. qualificació general en el moment de la preparació de la revisióDestacaré els avantatges i els inconvenients d'un robot aspirador.
Primer, sobre els avantatges. M'han agradat els següents:
- En primer lloc, la mida compacta de l'estació integrada permet instal·lar-la en un armari, amagada de la vista i estalviant un valuós espai.
- L'estació es connecta tant al clavegueram com al subministrament d'aigua. De fet, actualment és l'únic robot aspirador Roborock del mercat que es pot connectar a les línies de serveis públics.
- El robot és més curt que els models lidar i pot netejar fins a 8 cm d'espais sota els mobles, sense comprometre la navegació. Pot accedir a zones a les quals els robots amb una torre lidar muntada al cos no poden accedir. A més, la seva trajectòria és precisa, sense passar per alt cap zona.
- Un sistema de reconeixement d'objectes retroil·luminat que funciona eficaçment en bones condicions de llum.
- Una estació completament carregada segons els estàndards del 2026. Té absolutament totes les funcions disponibles al mercat: escalfament d'aigua, escalfament d'aire, fons autonetejant, barreja automàtica de detergent i control del nivell de brutícia amb tovalloletes.
- Els raspalls laterals i centrals no enreden els cabells ni el pèl gràcies al seu disseny actualitzat.
- Millora de la maniobrabilitat gràcies al cos elevat. El robot aspirador pot superar llindars de més de 3 cm d'alçada, una gesta impossible amb productes similars disponibles actualment al mercat global.
- El raspall lateral retràctil escombra completament les restes de les cantonades.
- El tovalló s'estira a prop del sòcol.
- Aixecar tovallons en conduir per sobre de catifes.
- Retirada automàtica de tovallons a l'estació.
- Aixecant el raspall turbo i el raspall lateral en mode de neteja en humit.
- Augment de la potència de succió.
- Neteja en sec i en humit d'alta qualitat en diverses superfícies.
- Capaç d'eliminar fins i tot les taques més difícils més ràpidament que els seus anàlegs.
- Un gran nombre de funcions a l'aplicació.
- Russificació completa en la versió per al mercat rus.
- Monitorització remota de la llar connectant-se a la càmera del robot a través d'un telèfon intel·ligent.
- Control a través de l'assistent de veu patentat Hello Rocky.
- El robot aspirador no té por de les superfícies negres.
- Baix nivell de soroll tant del robot com de l'estació.
- Muntatge d'alta qualitat i alta autoritat de marca.
- Disponibilitat de garantia i servei tècnic.
Pel que fa a les deficiències, aquestes són les que s'han identificat:
- El més important per a mi és que no hi ha accés als components interns de l'estació, concretament al sistema de drenatge d'aigües residuals. És impossible dur a terme una inspecció. I serà necessària de totes maneres.
- El robot aspirador no neteja darrere de cortines i cortines.
- El sistema de reconeixement d'objectes és una mica cec a la foscor i, per tant, requereix alguna millora.
En definitiva, al meu entendre, el Roborock Saros 10R és actualment el millor robot aspirador de la línia premium Roborock. És eficient, potent, net i ara fins i tot es connecta a un desguàs i a un subministrament d'aigua, una cosa que els Roborocks tenien molt a faltar. Sens dubte, és un dels millors robots aspiradors disponibles a principis del 2026, abans que es llancin nous models. La seva alta posició a la classificació general és una confirmació indirecta d'això.
En aquest sentit, m'agradaria acabar aquesta ressenya. Si teniu cap pregunta, feu-la als comentaris. Bones compres a tothom. Adéu!







