Roborock Qrevo CurvX: un tàndem de les versions Curv i S9 MaxV! Quin és el resultat?

El nou robot aspirador Roborock Qrevo CurvX és un tàndem de robots llançats anteriorment. Roborock Qrevo Curv I Roborock S9 MaxV UltraEl primer va incloure l'estació, el seu disseny i les seves capacitats, així com el mòdul de neteja. El segon va incloure el lidar, que es retràctil dins del cos, i la potència de succió va augmentar fins a 22.000 Pa. El resultat és un conjunt únic de solucions a la línia Roborock, que sens dubte serà òptim per a determinades condicions. El preu oficial de llançament és de 1.100 €, que, de nou, està a mig camí entre les versions Curv i S9 MaxV. Així doncs, a continuació, provaré el Roborock Qrevo CurvX en detall, destacaré els avantatges i els inconvenients en funció dels resultats de les proves i després expressaré la meva pròpia opinió. Així doncs, comencem!
Equipament
El robot aspirador va arribar en una caixa de marca com aquesta:
Caixa
El paquet inclou el robot en si i la seva estació, dos porta-tovalloletes, un adaptador de corrent i un manual d'instruccions en rus. Sorprenentment, la caixa no incloïa una bossa de recanvi per a la pols.

Equipament
Aspecte
Ara fem una ullada al disseny del Roborock Qrevo CurvX. Comencem amb el robot aspirador en si. És de color blanc i té un cos rodó.

Vista superior
L'alçada indicada és de 79,8 mm, tot i que en realitat vaig mesurar 75 mm amb el lidar plegat i uns 90 mm amb ell aixecat, que també és més baixa que els anàlegs lidar.

Alçada del cos
Un sensor de paret està instal·lat a la dreta, i un sistema de sensors i càmeres il·luminades està situat al centre per reconèixer i navegar amb precisió pels objectes del terra. La tecnologia s'anomena Reconeixement d'Obstacles per IA Reactiva.

Sistema de reconeixement d'objectes
La funció de monitorització remota de la llar s'implementa en aquest model:

Monitorització remota de la llar
El lidar està equipat amb una coberta amb ressort que evita que el robot s'encalli sota els mobles. S'estén quan comença la neteja i es retrau en espais estrets, així com quan el robot torna a la seva posició després de la neteja. El panell de control inclou dos botons de control mecànic, un sensor d'alçada superior i obertures per al micròfon per al control per veu.
El col·lector de pols es troba sota la coberta superior, que es manté al seu lloc mitjançant imants. El sistema de filtració, com és habitual, està basat exclusivament en HEPA. Hi ha un dipòsit d'aigua situat dins del robot, però està amagat dins del cos. L'aigua es bomba automàticament al dipòsit a l'estació.
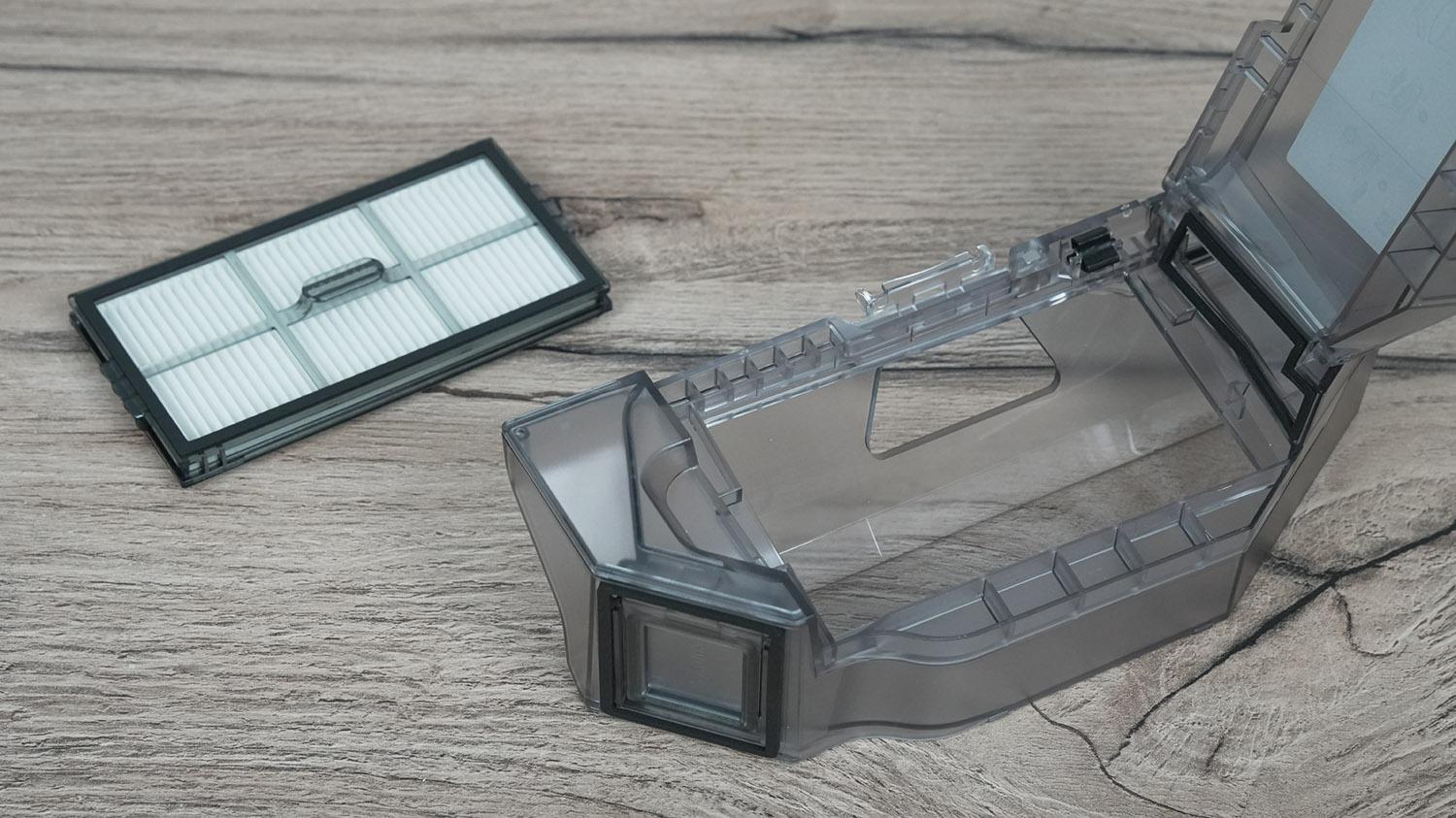
Col·lector de pols
Hi ha cinc sensors de protecció contra caigudes. També hi ha un sensor de detecció de catifes. El raspall lateral és de doble feix i està fixat amb un cargol.
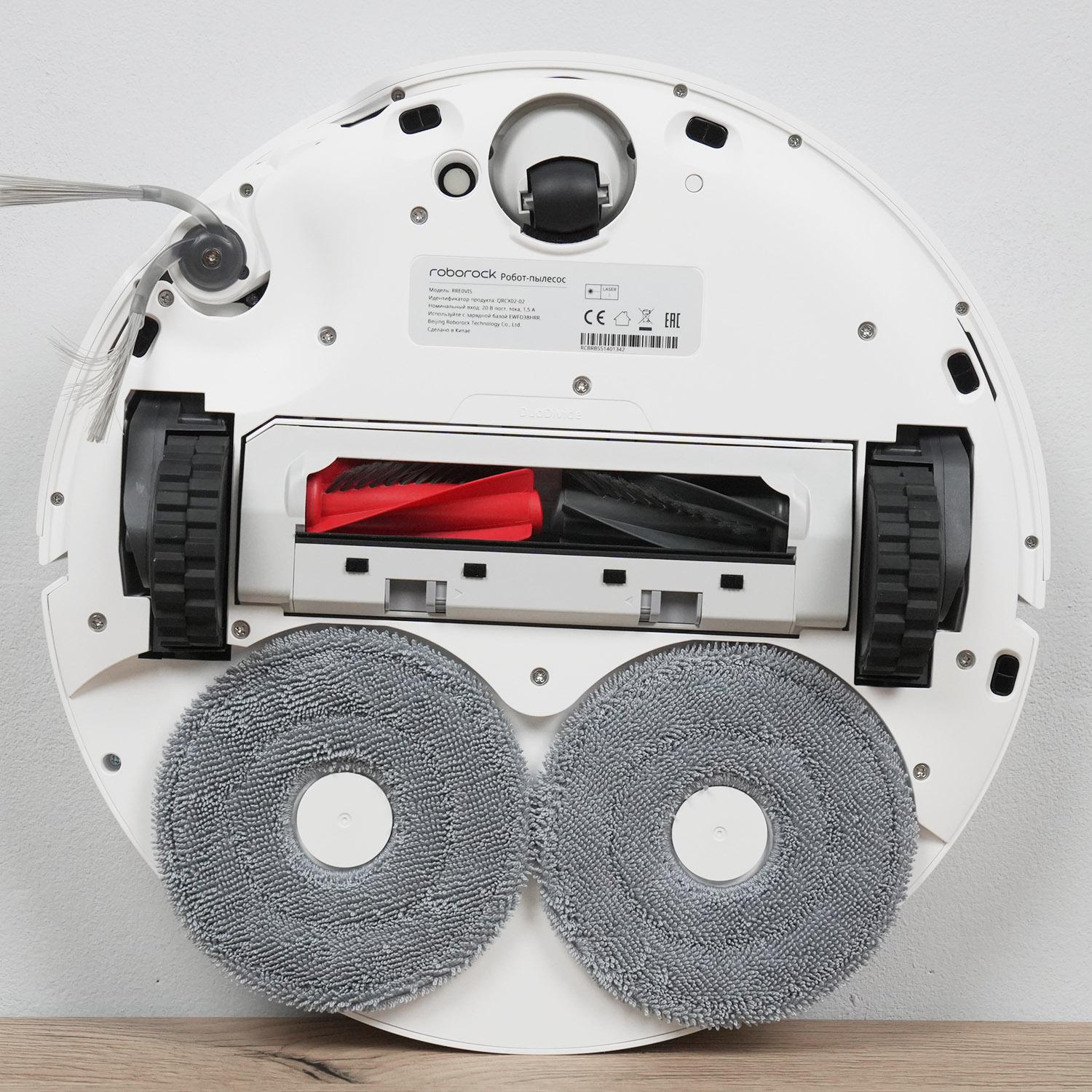
Vista inferior
A les cantonades i sota els mobles, el raspall lateral s'estén per a una recollida de deixalles més eficient.

Raspall lateral retràctil
La unitat central de raspall és flotant. El raspall en si és un disseny DuoDivide. Són els dos mitjos raspalls de truges provats amb un espai al centre entre ells. Cada mig raspall es pot desmuntar. L'espai en si recull els cabells i la pell enrotllada. També cal destacar que el raspall turbo puja durant el mode de neteja de terres i quan el robot torna a l'estació.
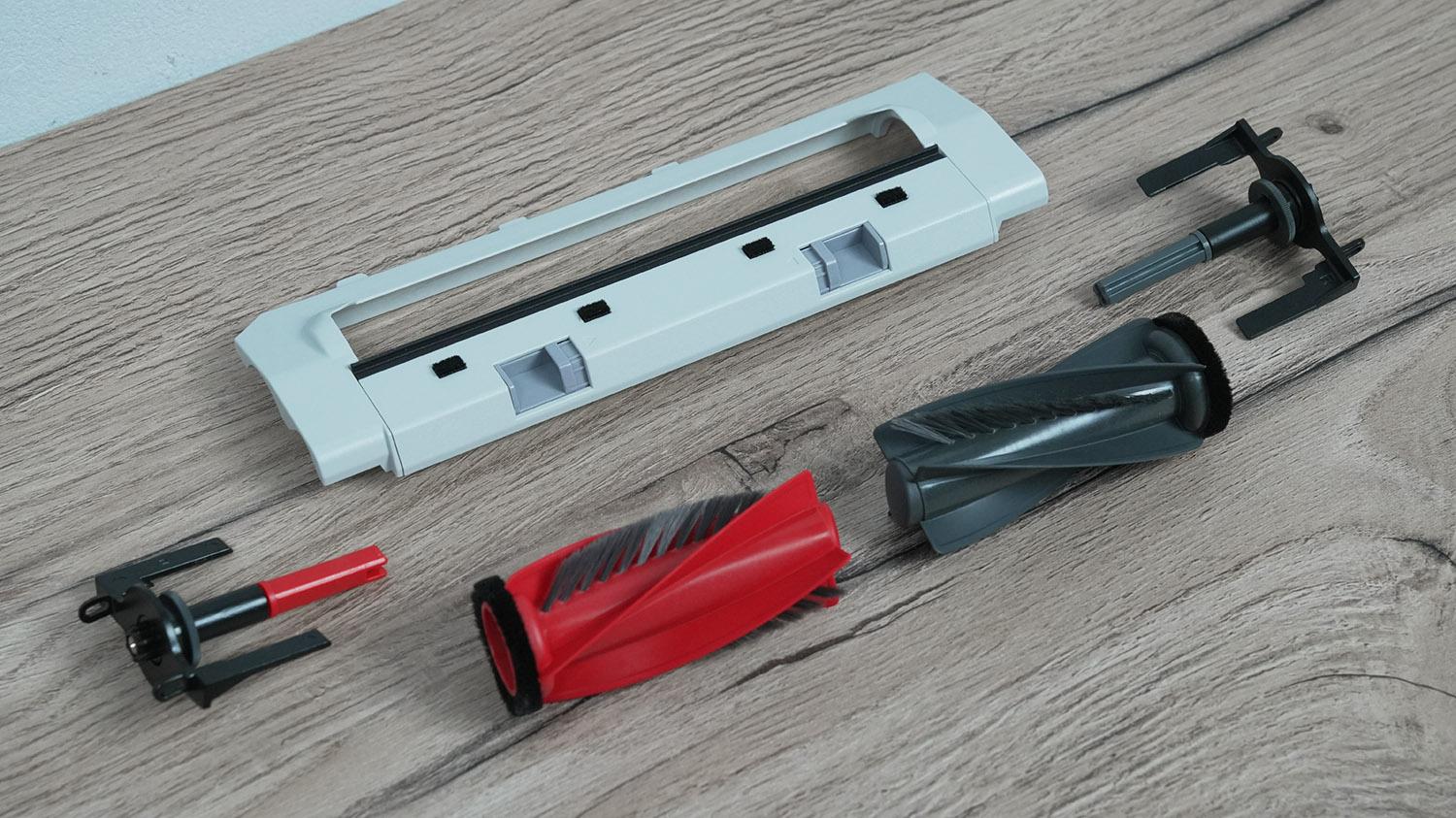
raspall central
Els coixinets de neteja són rodons, com els d'altres robots de la línia Qrevo. Darrere del suport dret, es pot veure un mecanisme que estén el coixinet fins a la vora del cos. Això elimina el punt cec entre la vora del coixinet i el sòcol, permetent que el robot netegi millor les parets i els mobles.

Mecanisme d'alliberament del tovalló
També voldria afegir que els coixinets de neteja s'aixequen automàticament en entrar a les catifes, quan el robot torna a l'estació i quan el robot entra a una habitació o zona de neteja designada. L'alçada d'elevació del coixinet de neteja s'ha augmentat a 17 mm. També és important tenir en compte que la pressió al terra del coixinet de neteja s'ha millorat a 12 N.

Alçada d'aixecament de tovallons
Unes paraules sobre l'elevació corporal. Tot el cos s'eleva automàticament quan el robot detecta obstacles alts o catifes de pèl mitjà. Això permet que el robot aspirador pugui superar llindars de dos nivells de fins a 4 cm d'alçada. Aquesta tecnologia s'anomena AdaptLift.
Pel que fa a l'estació, és com la versió normal de Curv: amb cantonades arrodonides a l'estil del casc de Darth Vader. M'agradava més aquest disseny.

Estació
Tanmateix, aquesta versió de l'estació té alguns matisos. Per exemple, la rampa per a l'entrada del robot ja no és extraïble. Només la safata de rentat de tovallons és extraïble. Consta de dues parts: el mòdul texturitzat en si, on es renten els tovallons, i una safata amb raspadors i un filtre gruixut. Això garanteix que la safata de l'estació es netegi automàticament en rentar els tovallons.

Safata extraïble
Els draps es renten amb aigua calenta a 80 graus Celsius i s'assequen amb aire calent a 45 graus Celsius. L'estació pot detectar automàticament el grau de brutícia dels draps i tornar-los a netejar. Tanmateix, l'estació no té un drap desmuntable per a una neteja completa en sec, a diferència dels models estrella com l'S9 MaxV Ultra, el Saros 10R i el Saros Z70.
Sota la coberta superior de l'estació hi ha dipòsits d'aigua i una bossa de residus. Cada dipòsit té una capacitat de 4 litres. Dins del dipòsit d'aigua neta hi ha un mòdul de desinfecció. La bossa de residus és estàndard. Malauradament, no hi ha un dispensador automàtic de detergent.

Ubicació dels tancs

dipòsits d'aigua
Parlant de la connexió al clavegueram i al subministrament d'aigua, aquesta estació en particular no es pot connectar a les xarxes de serveis públics.
Tots els avantatges i els inconvenients del disseny del robot s'esbossaran a l'anàlisi final. Seguim endavant!
Especificacions tècniques
Les principals característiques del Roborock Qrevo CurvX, tal com indica el fabricant:
- Bateria de ions de liti de 6400 mAh.
- Potència d'aspiració fins a 22.000 Pa.
- Capacitat del col·lector de pols: 300 ml.
- Capacitat del dipòsit d'aigua: 70 ml.
- Franja d'obstacles de fins a 40 mm.
- Dimensions del robot: 353*79,8 mm.
Estació:
- Dipòsit d'aigua neta: 4 l.
- Dipòsit d'aigua bruta: 3,5 l.
- Bossa a l'estació: 2,7 l.
- Dimensions de l'estació: 450*450*450 mm.
L'alta potència d'aspiració i la millora de la maniobrabilitat són característiques destacades. Aquests paràmetres es verificaran en proves.
Capacitats funcionals
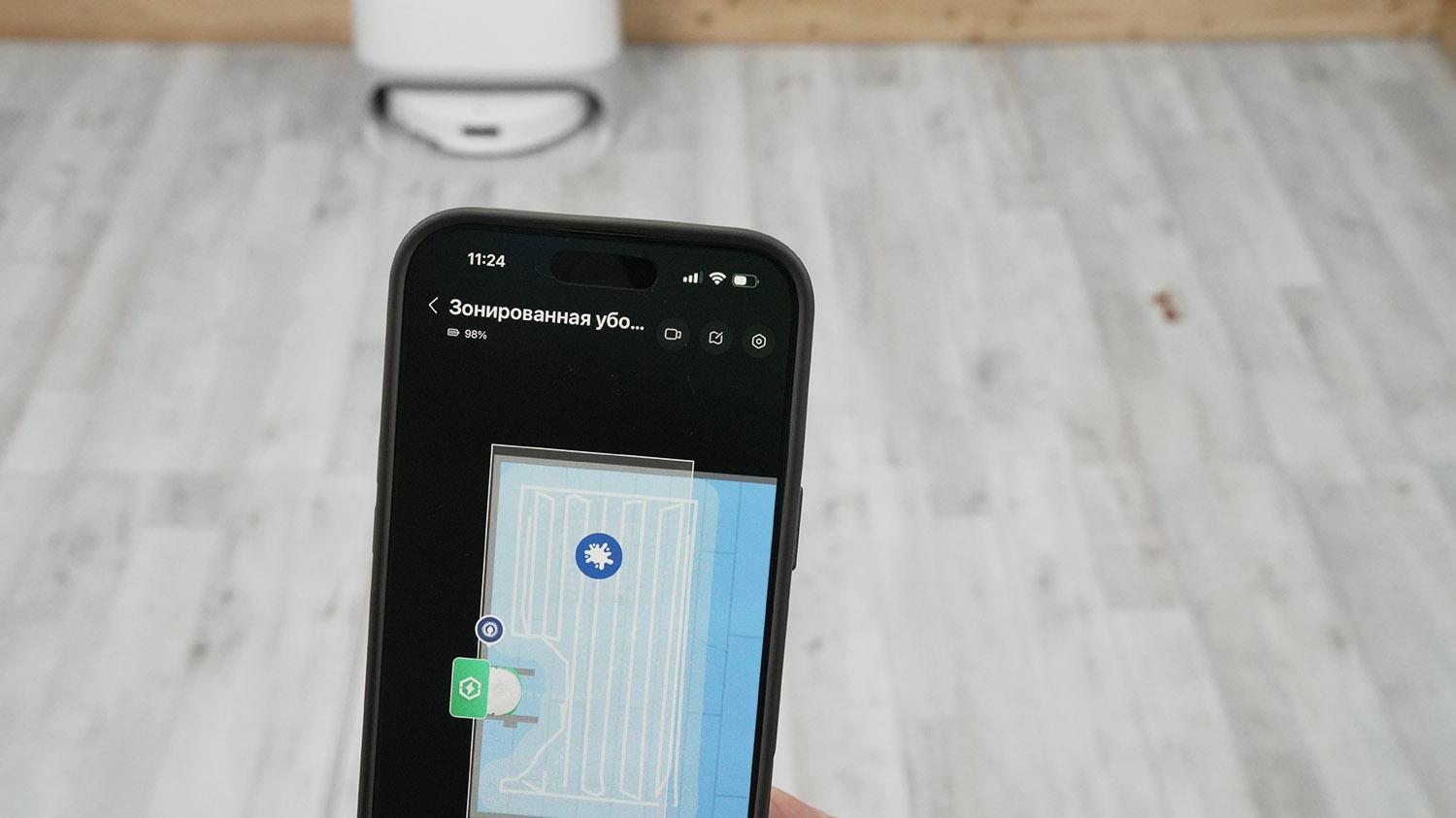
Passem a una visió general de les característiques del Roborock Qrevo CurvX. El robot aspirador es controla mitjançant l'aplicació mòbil patentada de Roborock. Connectar-se a la xarxa és senzill; seguiu les instruccions del fabricant. La meva versió és en rus, de manera que les instruccions de veu són en rus. La versió global és en anglès, igual que el control mitjançant l'assistent patentat. Tingueu-ho en compte.

Control mitjançant l'aplicació
Les funcions principals es mostren a la pantalla:
- Rentar els tovallons amb aigua calenta (80 °C).
- Assecar tovallons amb aire calent (45 °C).
- Autoneteja del col·lector de pols a l'estació.
- Reomplir el dipòsit del robot a través de l'estació.
- Reconeixement d'objectes al terra.
- Reconeixement automàtic de tolls i taques.
- Monitorització remota mitjançant càmera.
- Desar diversos mapes de neteja a la memòria.
- Mapa 3D de l'habitació.
- Zonificació automàtica de les instal·lacions en habitacions.
- Selecció de zones i habitacions per a la neteja.
- Parets virtuals i zones prohibides (i per al mode de neteja en humit).
- Ajust de la potència d'aspiració.
- Ajust del grau d'humitació del tovalló.
- Mode de neteja intensiva en humit.
- Mode d'usuari.
- Establir la freqüència de rentat de tovallons.
- Planificació intel·ligent de la neteja SmartPlan.
- Registre de neteja.
- Organitzar la neteja segons un horari.
- Augment automàtic de la potència a la catifa
- Neteja de catifes en mode de neteja humida.
- Aixecar tovallons en conduir per sobre de catifes.
- Aixecar el cos en superar obstacles.
- Augment de la pressió sobre les tovalloletes quan es detecta contaminació.
- Millora de la neteja sota els mobles.
- Extensió del raspall lateral a les cantonades.
- Moure el tovalló al rodapié.
- Lidar entrant al cos.
- Detecció intel·ligent del grau de contaminació dels tovallons a l'estació.
- Aixecar els raspalls en mode de rentat de terres i en tornar a l'estació.
- Suport de Yandex.Alice.
- Suport per a l'assistent de veu "Hola, Rocky".
Com podeu veure, hem implementat una àmplia gamma de funcions que us permeten personalitzar els paràmetres de neteja de manera flexible segons les vostres necessitats. Hi ha compatibilitat amb l'assistent propietari, la monitorització remota de la llar i diversos modes intel·ligents. Això és un avantatge!
Proves
Ja s'ha preparat i publicat al canal una revisió detallada en vídeo amb totes les proves:
Navegació
I finalment, passem a les proves. Primer, provarem la navegació en una habitació amb obstacles. En entrar a l'habitació, el robot aspirador primer va escombrar una pota de la taula, després va recórrer el perímetre i finalment va netejar tota la zona accessible en un patró serpentejant. El mirall va introduir un error al mapa, cosa normal per als robots lidar. El robot es va quedar encallat a les potes d'una assecadora quan es movia, però va poder alliberar-se. Va escombrar les potes de la taula i després va tornar a la seva base.

Navegant dins d'una sala
Parlant de navegació dins de la llar, el Roborock Qrevo CurvX neteja habitació per habitació, primer al llarg del perímetre i després en un patró serpentejant. Després de cada habitació, tal com s'especifica a la configuració, el robot aspirador torna a l'estació i renta els coixinets de neteja, i després torna a netejar des d'on ho havia deixat. Quan torna a l'estació i torna al punt de neteja, el robot recull no només els coixinets de neteja, sinó també els raspalls. Això és un avantatge. No hi ha zones sense netejar, la velocitat de neteja és alta i aquest model té una navegació excel·lent!
Passant per sota de mobles baixos
També es va comprovar l'alçada mínima a la qual pot passar el robot. Vaig poder crear una distància lliure de 78 mm i va arribar-hi sense cap problema. Això és un avantatge.

Passant per sota de mobles baixos
Autonomia
També vaig provar la durada de la bateria quan feia funcionar el robot a màxima potència amb la neteja humida activada. Va durar 107 minuts, netejant 83 metres quadrats d'espai útil. En realitat, això són poc més de dues neteges completes d'un apartament de dues habitacions de 70 metres quadrats. També inclou un mode de represa de la neteja després de recarregar-lo a l'estació de càrrega, de manera que aquest model és capaç de netejar zones més grans.
Reconeixement d'objectes al terra
Pel que fa al sistema d'evitació d'objectes, amb bona il·luminació, el robot va ser capaç de reconèixer correctament i evitar amb cura 6 de 6 objectes a terra, colpejant lleugerament una joguina i una bàscula de bany. També va ser capaç de reconèixer correctament i evitar 3 de 3 mitjons, enganxant-ne lleugerament un de negre. Dels 4 cables, en va reconèixer dos, però en va evitar amb cura tres, mossegant-ne un. Pel que fa a evitar imitacions de sorpreses de mascotes, el Roborock Qrevo CurvX va ser capaç d'evitar amb precisió 4 trampes, identificant-ne 3. Va passar per sobre de les altres dues.
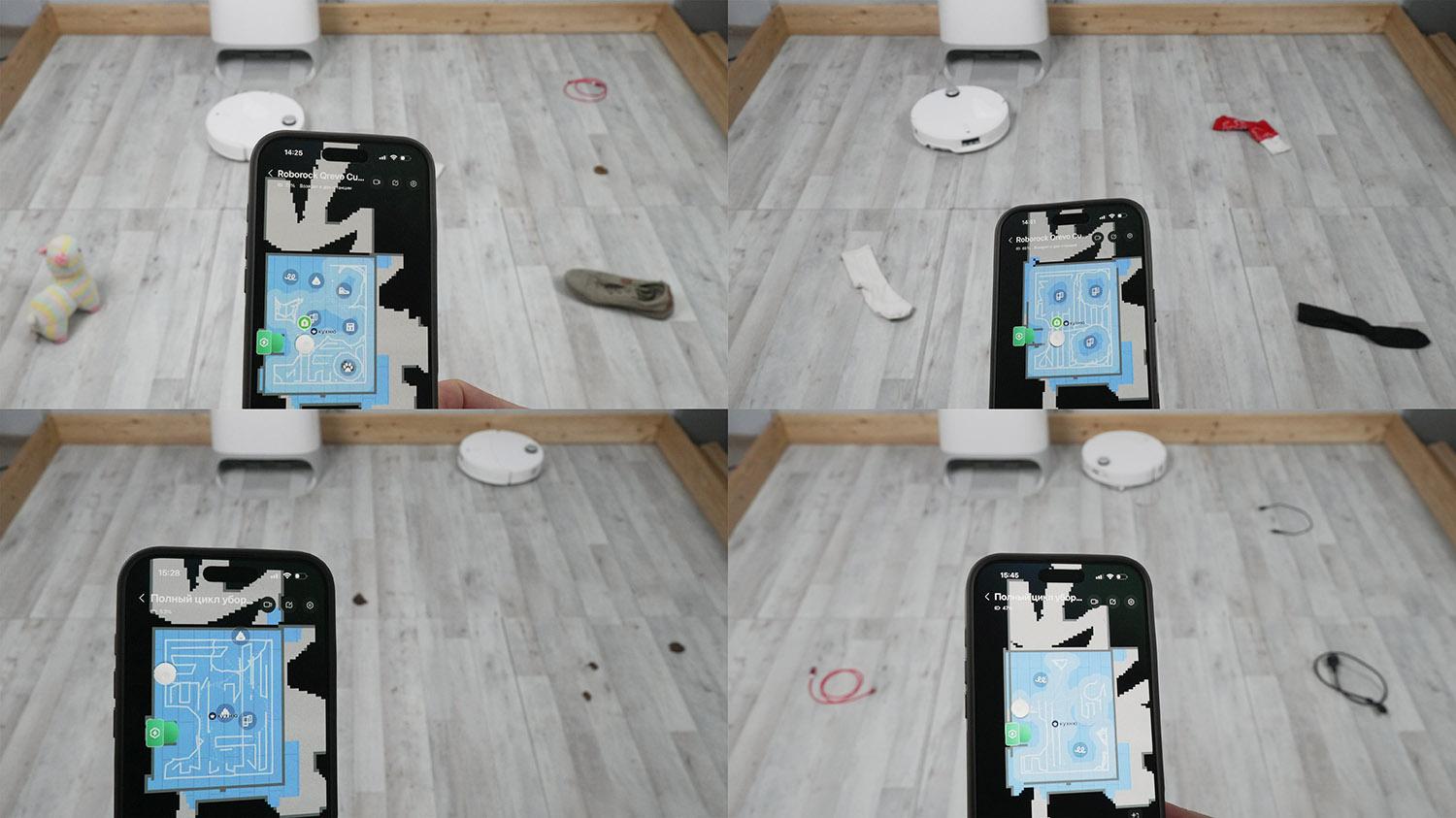
Reconeixement d'objectes al terra
En foscor completa, el sistema de reconeixement d'objectes està una mica deteriorat. Dels sis objectes domèstics estàndard provats, el robot en va reconèixer i evitar cinc, només passant per sobre d'una sorpresa simulada de mascota. De tres mitjons, no en va reconèixer cap correctament, tot i que va aconseguir evitar-ne un, però va rosegar els altres dos, cosa que va provocar un error. Va poder evitar els quatre cables, però només en va reconèixer dos. El robot va fallar la prova del "Camp de mines", evitant només una de les sis trampes en foscor completa, mentre que en va reconèixer dues de simulades.
En general, els enginyers de la marca encara tenen molta feina per fer.
La funció de detecció de taques mereix una atenció especial. El robot aspirador neteja inicialment com de costum, però quan detecta una taca, desactiva la succió i fa un patró encreuat en aquesta zona. A la segona passada, prem la part posterior més fort contra el terra. Després, torna a l'estació, neteja els coixinets de neteja i reprèn la neteja com de costum, tot i que la taca no s'ha eliminat.
Reconeixement puntual
Seria bo implementar un algoritme aquí de manera que després de cada passada local el robot avalués l'estat de la zona contaminada i decidís si continua esbandint-la localment o elimina la taca.
Neteja darrere les cortines
També vaig comprovar si el nou sistema de navegació pot netejar darrere de cortines i cortines, cosa que la majoria de robots lidar no poden fer. No, aquest robot, com els seus germans de la línia, no neteja darrere de cortines.
Potència de succió
La prova de potència va ser una de les més interessants del projecte. En mode Silenciós, el Roborock Qrevo CurvX només va poder netejar les restes d'un espai de 2 mm. Els resultats no van canviar en els modes Equilibri i Turbo. En els modes Màxim i Màx+, el robot va aconseguir netejar un espai de 4 mm. El resultat és el mateix que el del Roborock S9 MaxV Ultra. Per tant, la potència és lleugerament superior, però no arriba als 22.000 Pascal.

Potència de succió
SOBRE motius de la caiguda de potència Vaig escriure una ressenya a part al lloc web sobre això. No està gens malament, de fet; recomano que li feu una ullada.
Neteja en sec
La qualitat de la recollida de deixalles en sòls laminats és bona. Es van recollir diverses deixalles del prestatge, incloent-hi pèl·lets de sorra per a gats, que sovint obstrueixen el raspall turbo. És important tenir en compte que aquest robot aspirador va netejar bé les cantonades interiors, sense deixar cap deixalla. Finalment, l'algoritme del raspall lateral s'ha refinat i ara no hi ha punts cecs. Això està bé! Tanmateix, les cantonades exteriors encara necessiten una mica de feina, ja que hi ha un petit punt cec.

Neteja en sec
El raspall lateral està net després de la prova, però el raspall central només ha recollit una petita quantitat de pèl. A continuació, provaré la protecció antiembolics per separat.

Estat del mòdul de neteja
Protecció capil·lar anti-embolics
També vaig provar com el raspall turbo patentat gestiona el pèl autonetejant i el pèl d'animals gràcies al seu disseny especial. Vaig posar pèls de diferents longituds al terra. El robot els va recollir i tant el raspall turbo com el raspall lateral van quedar nets. Va quedar algun pèl als espais entre els raspalls, però finalment tots van acabar al contenidor de la pols. Bravo, enginyers de Roborock!

Protecció capil·lar anti-embolics
Neteja de catifes
A més, hi havia deixalles escampades a la catifa de pèl curt. Puc dir que el robot va netejar la catifa a fons. També pot netejar catifes de pèl mitjà, però no tan bé. Va quedar una quantitat mínima de deixalles a la pila.

Roborock Qrevo CurvX: Neteja de catifes
Autoneteja
Immediatament després de les "proves de brutícia", vaig comprovar el rendiment d'autoneteja del robot aspirador. Veiem que el dipòsit de pols està completament ple. Tornem el robot a l'estació i comencem l'autoneteja. El resultat és bo. El dipòsit de pols està completament buit. La prova ha estat correcta!
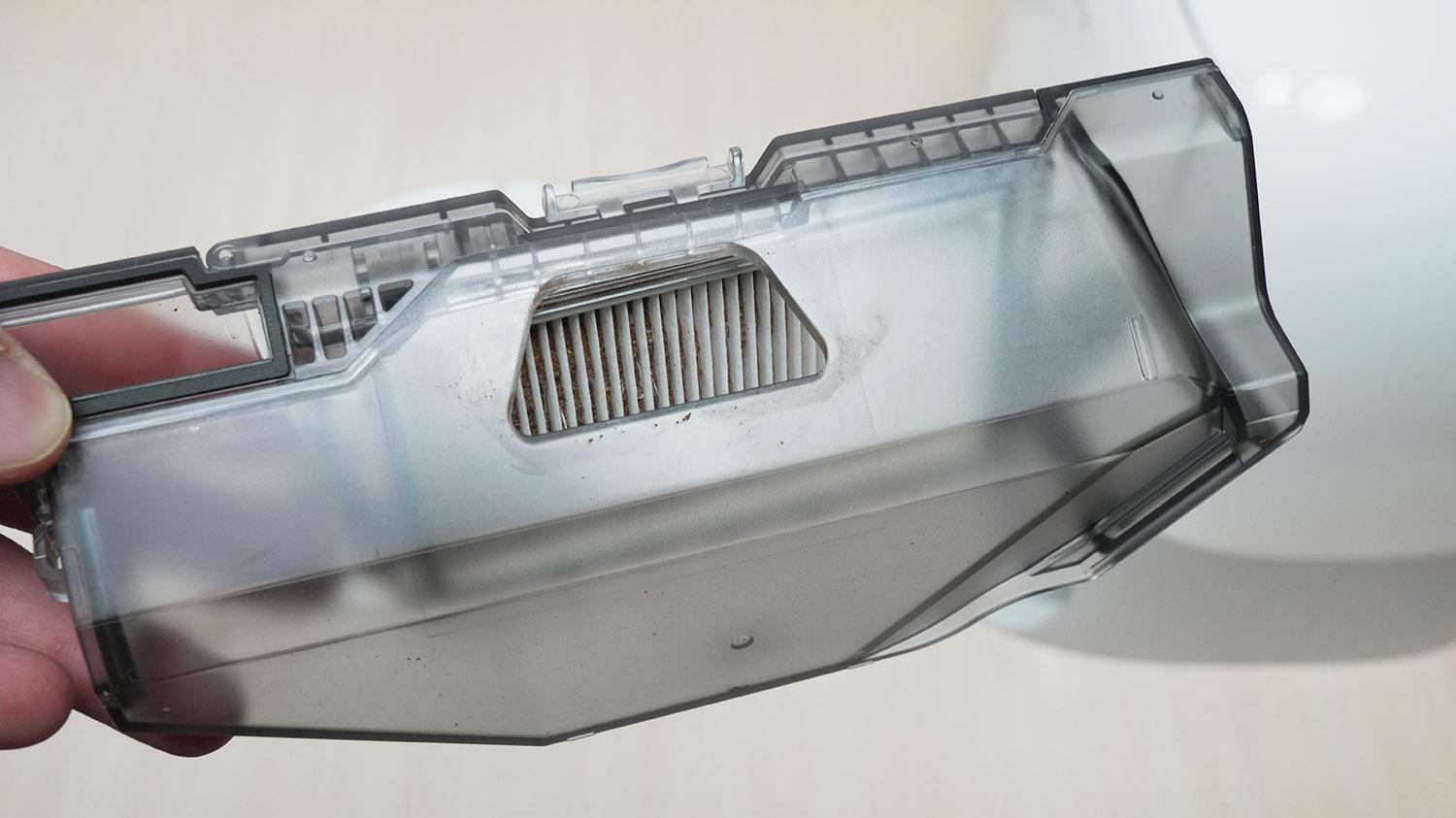
Autoneteja
Neteja humida i catifes
Quan es tracta de neteja humida en terres amb moqueta, el robot ofereix diversos modes d'interacció. Pot navegar amb cura per la catifa durant la neteja humida o pot conduir sobre la catifa i prémer-hi els coixinets de neteja si voleu netejar-la amb el robot. També pot netejar catifes durant la neteja humida, aixecant automàticament els coixinets de neteja i fins i tot el cos del robot quan entra a la catifa. Aquesta última opció és la més eficient.

Neteja humida i catifes
Netejant la brutícia
El rendiment de neteja és excel·lent. Les tovalloletes pressionen fermament contra el terra i absorbeixen la brutícia. No hi ha cap zona sense rentar al llarg dels sòcols, gràcies a l'extensió de l'eixugador. Això és un avantatge!
També he comprovat els punts cecs de les cantonades exteriors i interiors per separat. Aquí també veiem que la cantonada exterior no es neteja completament, deixant un petit punt cec d'un parell de centímetres d'amplada. A les cantonades interiors, el punt cec fa uns 5 cm, ja que la tela no pot encaixar físicament a la cantonada.
Eliminació de taques difícils
Pel que fa a l'eliminació de taques difícils, vaig desactivar el sistema de detecció de taques per evitar canviar l'algoritme de neteja i augmentar el nombre de passades a causa de la neteja puntual de cada taca. Malauradament, la funció de pressió millorada al terra no es pot activar manualment, ja que només s'activa automàticament quan es detecten tolls i taques. Com a resultat, en el mode de neteja estàndard de serp densa, el robot va poder eliminar les taques en només sis passades. Aquest també és un bon resultat, però amb una pressió addicional, el robot probablement hauria completat la tasca encara més ràpidament.

Eliminació de taques difícils
Prova de rentat i assecat de tovallons
M'agradaria parlar immediatament de l'eficiència de l'estació en si. Comencem per la qualitat del rentat de les tovalloletes. Fins i tot després de proves exhaustives, les tovalloletes tenen un aspecte significativament millor després de rentar-les amb l'estació. La funció d'escalfament d'aigua sens dubte millora l'eficiència del rentat.
Vaig decidir provar la temperatura de rentat jo mateix. En el meu cas, la temperatura màxima a la zona del desguàs va ser de 53,3 graus. Tot i que poden ser possibles errors de mesura, depenent de la ubicació d'instal·lació del sensor i de la seva precisió, les tovalloletes estaven realment calentes després del rentat. El sensor va mostrar una temperatura superior a 37 graus.

Temperatura dels tovallons després del rentat
Però la temperatura d'assecat és alta: el sensor mostrava més de 50 graus, cosa que és un bon resultat! Fins i tot més alta del que s'ha indicat!

Temperatura d'assecat per a tovallons
Manteniment de l'estació
Fins i tot amb els raspadors nous a la safata, caldrà rentar l'estació a mà periòdicament. I aquí teniu el problema. Sí, podeu treure la safata, que, fins i tot amb els raspadors, caldrà rentar a mà de tant en tant, ja que els cabells i les restes grans obstrueixen el filtre. Però tot això és fàcil de netejar. El desguàs, però, no és extraïble i també s'embruta. És menys còmode de netejar i és estrany que no l'hagin fet extraïble, com molts dels models anteriors de la línia.
franquícia d'obstacles
Un punt interessant és la seva capacitat per superar llindars. El Roborock Qrevo CurvX pot superar fàcilment un llindar de 2 cm, cosa que sembla obvi. Tanmateix, té dificultats per superar un llindar de 3 cm. Un llindar d'un sol nivell de 4 cm, o més precisament un llindar de 38 mm, era impossible de superar, independentment de quant aixequés el cos o en quins angles. Tanmateix, amb un llindar de dos nivells, 2 cm a cada nivell, en la meva configuració, el robot va aconseguir superar l'obstacle després de diversos intents. Per tant, la seva maniobrabilitat és sens dubte millor que la de molts models del mercat.

Moure l'alçada del llindar de 4 cm
Conduir sobre superfícies negres
Conduir sobre catifes negres no és cap problema. El robot llisca sobre la catifa negra com si no hagués passat res.

Conduir sobre superfícies negres
Nivell de soroll
Pel que fa als nivells de soroll, oscil·len entre els 57,5 i els 69 dB, depenent del mode de funcionament seleccionat. Això és lleugerament inferior al de la majoria d'unitats similars, donada la seva major potència. El nivell de soroll de l'estació durant l'autoneteja és d'aproximadament 72,5 dB. Aquest també és un resultat estàndard.

Nivell de soroll
Opinió personal
El robot aspirador Roborock Qrevo CurvX ha estat revisat i provat a fons. Segons el nostre sistema de qualificació, ha obtingut una puntuació 225 puntsEls resultats són exactament els mateixos que els del Roborock Qrevo Curv llançat anteriorment. Per què? Ho explicaré al resum, però primer destacaré els avantatges i els inconvenients d'aquest model.
Valoració general dels robots aspiradors provats: https://robovac.washerhouse.com/ca/rejtingi/robovac-obshhij-rejting-robotov-pylesosov-robo.html.
Així doncs, m'han agradat els següents:
- El lidar està amagat al cos, cosa que permet que el robot aspirador netegi sota mobles de fins a 8 cm d'alçada.
- La presència d'una estació combinada per a l'autoneteja del col·lector de pols, el rentat i l'assecat de tovallons.
- L'estació és altament eficient. Compta amb autoneteja d'alta qualitat, rentat amb aigua calenta, assecat complet amb aire calent, raspadors a la safata que faciliten una mica el manteniment i dipòsits espaiosos. En resum, és un sistema complet que fa la feina.
- Els raspalls laterals i centrals no enreden els cabells ni el pèl gràcies al seu disseny actualitzat.
- Millora de la maniobrabilitat gràcies al cos elevat. El robot aspirador pot superar llindars d'un sol nivell de fins a 3 cm d'alçada i fins i tot pot enfilar-se per sobre d'un llindar de dos nivells de 4 cm, una gesta que molts robots similars no poden aconseguir.
- El raspall lateral retràctil escombra completament les restes de les cantonades.
- El tovalló s'estira a prop del sòcol.
- Un sistema de reconeixement d'objectes retroil·luminat que funciona eficaçment en bones condicions de llum.
- Monitorització remota de la llar connectant-se a la càmera del robot a través d'un telèfon intel·ligent.
- Millora de l'elevació dels eixugaparabrises en conduir sobre catifes.
- Aixecant el raspall turbo i el raspall lateral en mode de neteja en humit.
- Potència de succió lleugerament augmentada.
- Neteja en sec i en humit d'alta qualitat en diverses superfícies.
- Capaç d'eliminar fins i tot les taques més difícils més ràpidament que els seus anàlegs.
- Un gran nombre de funcions a l'aplicació.
- Russificació completa en la versió per al mercat rus.
- Control a través de l'assistent de veu patentat Hello Rocky.
- El robot aspirador no té por de les superfícies negres.
- Baix nivell de soroll del robot.
- Muntatge d'alta qualitat i alta autoritat de marca.
- Disponibilitat de garantia i servei tècnic.
Pel que fa a les deficiències, aquestes són les que s'han identificat:
- L'estació no es pot connectar a la xarxa d'aigua ni al clavegueram.
- No hi ha cap barreja automàtica de detergent des d'un dipòsit separat a l'estació.
- Encara s'observen pèrdues de potència.
- El sistema de reconeixement d'objectes necessita millores.
- Una rampa no desmuntable perquè el robot pugui entrar a l'estació.
El resultat final és una combinació de solucions que serà òptima per a certs propietaris. Però primer, permeteu-me que expliqui per què la qualificació és la mateixa que la de la versió estàndard de Curv. Va demostrar un rendiment més alt a la plataforma, amb un resultat de 8 mm enfront de 4 mm, mentre que la nova CurvX només tenia un lidar retràctil i exactament les mateixes crítiques dirigides a la versió estàndard de Curv. Per tant, l'elecció és entre un major rendiment i un cos més prim. La versió CurvX també és més cara.
Però en general, el robot aspirador és sens dubte bo. Neteja eficaçment zones grans, no enreda el pèl ni els cabells, és maniobrable i pot passar per espais de 8 cm. Per tant, sens dubte val la pena tenir-lo en compte.
En aquest sentit, m'agradaria acabar aquesta ressenya. Si teniu cap pregunta, feu-la als comentaris. Bones compres a tothom. Adéu!







