Kaip patiems pasigaminti robotinį dulkių siurblį – 2 surinkimo idėjos
Šiandieniniame skubančiame gyvenimo tempe ne visada lengva palaikyti švarą namuose. Šiuolaikinės technologijos gali padėti. Robotai dulkių siurbliai egzistuoja jau daugiau nei 15 metų. Jie paprastai primena didelį ritulį, kuris juda po kambarį pagal iš anksto nustatytą modelį arba atsitiktinai (kol į ką nors atsitrenkia) ir surenka šiukšles. Pateikiame dvi nuoseklias instrukcijas, kaip pasigaminti savo robotą dulkių siurblį.
Surinkimo medžiagos
Taigi, norint surinkti robotinį dulkių siurblį, reikia suprasti jo komponentus, pereikime juos žingsnis po žingsnio. Jis turi pats judėti po kambarį, todėl jam reikia variklių – nuo dviejų iki keturių, priklausomai nuo galutinės konstrukcijos, – taip pat galimybės keisti sukimosi kryptį ir greitį, o tai reiškia, kad jums reikia variklio valdymo plokštės. Jei naudojate nuolatinės srovės variklius, jums reikės plokštės su keturiais tranzistoriais (H tilteliu).
Naminis robotas dulkių siurblys turi aptikti susidūrimus su sienomis ir baldais. Tam reikalingi kliūčių jutikliai ir ribiniai jungikliai ant „buferio“. Taip pat reikalingas darbinis elementas – dulkių siurblys. Jis turi būti suprojektuotas veikti su žemos įtampos nuolatine srove (pvz., 12 V).
Be dulkių siurblio, jums reikės besisukančio šepečio, kuris išvalys paviršių, pakels kilimų krūvas ir nušluos šiukšles. Tam reikės dar vieno ar dviejų variklių.
Sistema, kuri visa tai valdys. Paprasčiausias variantas yra „Arduino“ plokštė. Šiai užduočiai tiks bet kokia plokštė; „Nano“ arba „Pro mini“ plokštės yra tinkamo dydžio šiam darbui.
1 idėja: robotas dulkių siurblys, pagamintas iš kartono
Roboto pagrindas pagamintas iš storo kartono. Geriausia jį suklijuoti keliais sluoksniais, pluoštus išlygiuojant statmenai. Techniniams komponentams jums reikės šių dalių:
- Bet kokia Arduino plokštė.
- Duonos lenta arba paprasta duonos lenta, iš principo galite apsieiti ir be jos, tiesiog viską lituokite.
- 2 ultragarsiniai atstumo jutikliai (atstumo ieškiklis).
- Dulkių siurblio turbina.
- Mažas variklis arba aušintuvas iš kompiuterio.
- Varikliai su pavarų dėžėmis ir ratais.
- Variklio valdiklis.
- Laidai grandinės jungtims.
- Baterijos ir įkrovimo valdiklis.
Robotui maitinti reikalingos trys ličio baterijos. Kiekvienos įtampa yra 3,7 V. Joms įkrauti reikalingas valdiklis, pvz., parodytas nuotraukoje:

Valdiklis
Roboto pavaros varikliams valdyti patogu naudoti modulį, pagrįstą L298 mikroschema. Tai H tilto grandinė, kurią galite surinkti patys iš atskirų komponentų, tačiau patikimiau įsigyti jau paruoštą plokštę. Ji leidžia nustatyti roboto dulkių siurblio greitį ir keisti jo kryptį.

Valdymo modulis
Norint reguliuoti greitį, PWM signalas tiekiamas į ENA arba ENB kontaktą, o norint nustatyti sukimosi kryptį, priešingi signalai tiekiami į vieno variklio IN1 ir IN2, o kito variklio IN3 ir IN4. Jei IN1 yra loginis 1, o IN2 – loginis 0, variklis sukasi viena kryptimi. Norėdami pakeisti kryptį, sukeiskite 1 su 0. Jį reikia surinkti naudojant „Arduino“ pagal šią schemą (galite naudoti bet kokius kontaktus; juos nurodote eskize).

Arduino grandinė
Toliau reikia pagaminti kartono pagrindą ir prie jo pritvirtinti ratus. Turėtumėte gauti kažką panašaus į tai:

Kartoninis pagrindas
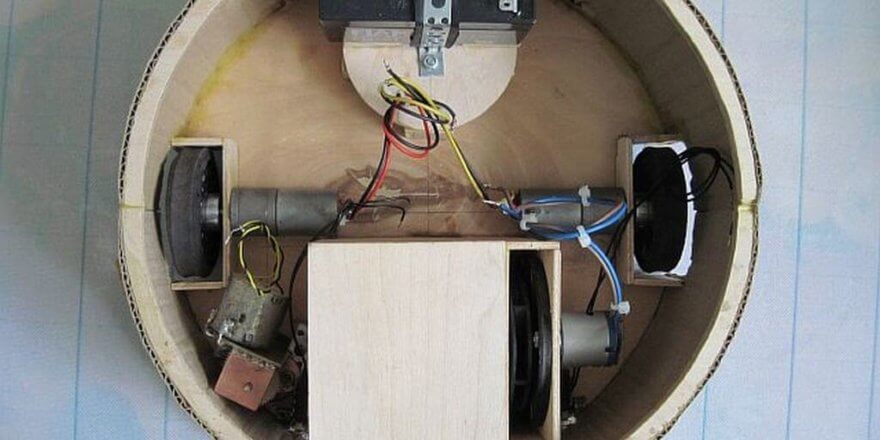
Vaizdas iš apačios. Du varomieji ratai su kampine pavarų dėže ir atraminiu ratuku:

Važiuoklės bazė
Dabar reikia surinkti grandinę, kuri bus montuojama ant pagrindo. Pagrindas turėtų būti apie 30 cm skersmens, kad tilptų ir elektronika, ir pats dulkių siurblio blokas.

Korpuso surinkimas
Vietoj atstumo matuoklių galite naudoti prie buferio montuojamą sistemą, prijungtą prie ribinių jungiklių. Susidūrus su kliūtimi, valdymo sistema signalizuos apie krypties pasikeitimą.

Buferis
Kontaktinius buferius galite pasigaminti ir patys. Jums reikės plonos, bet standžios vielos, pavyzdžiui, susuktos poros kabelio. Norėdami tai padaryti, buferio vidinėje pusėje, naudodami foliją, padarykite kontaktinį plotą ir pritvirtinkite laidą, kaip parodyta žemiau. Kai robotas dulkių siurblys atsitrenks į baldus ar sienas, jie susilies. Reguliuokite atstumą nuo laido iki folijos, kad pasiektumėte norimą jautrumą ir išvengtumėte klaidingų aliarmų. Į foliją tiekiama 5 V įtampa, o laidas eina į „Arduino“ įvestį, per kelių kiloomų rezistorių įjungtą į neigiamą polių.

Naminis kontaktinis buferis
Įrenginys maitinamas baterijomis; valdymo sistemai maitinti gali būti naudojami linijiniai stabilizatoriai, tokie kaip l7805. Variklio greičiui reguliuoti tinka žemesnio lygio keitiklis, pvz., LM2596.
Sunkiausia dalis yra dulkių siurblio projektavimas ir surinkimas. Štai apytikslis brėžinys:

Dulkių siurblio schema
Nulaužiame originalias ventiliatoriaus mentes ir prie rotoriaus pritvirtiname dulkių siurblio turbiną. Svarbu tiksliai pritvirtinti turbiną centre, kitaip atsiras disbalansas ir vibracijos.

Robotinė turbina
Štai kaip atrodo turbinos galinė dalis, pritvirtinta prie aušintuvo rotoriaus. Ją galima pritvirtinti karštais klijais arba superklijais.

Turbinos vaizdas iš vidaus
Tai viskas, ką reikia pasakyti – nuoseklus vadovas, kaip surinkti robotinį dulkių siurblį iš metalo laužo. Jo veikimo algoritmas yra toks: robotinis dulkių siurblys juda pirmyn, kol susiduria su kliūtimi. Po susidūrimo (arba priartėjimo, jei naudojate ultragarsinius tolimačius) jis sustoja, pasisuka atgal iš anksto nustatytu atstumu, pasisuka atsitiktiniu kampu ir juda toliau.
2 idėja: Beveik gamyklą primenantis robotas
Pristatome jums paprastesnį roboto dulkių siurblio projektą. Štai kaip jis atrodo surinktas:

Naminis robotinis dulkių siurblys
Navigacijos sistema surinkta iš šešių IR kliūčių jutiklių rinkinio. Jei nė vienas iš jų nesuveikia, numatyti du kontaktiniai jutikliai (ribiniai jungikliai). Variklio valdymo sistemoje naudojamas tas pats valdiklis su L298N mikroschema. Norėdami ją surinkti, jums reikės:
- Iš pradžių buvo naudojama „Arduino“ plokštė „Pro-mini“.
- USB-TTL adapteris šiam „Arduino“ modeliui programuoti. Jei naudojate „Arduino Nano“, jo nereikės, nes jis palaiko programavimą per USB.
- L298N variklių tvarkyklė.
- Ratų varikliai su pavarų dėže.
- 6 IR jutikliai.
- Turbinos varikliai (jei įmanoma, galingesni).
- Dulkių siurblio turbinos sparnuotė.
- Šepetėlių varikliai gali būti bet kokie.
- 2 susidūrimo jutikliai.
Surinkite viską pagal šią schemą:

Roboto dulkių siurblio surinkimo schema
Norėdami surinkti roboto dulkių siurblio maitinimo grandinę, jums reikės:
- 4 ličio baterijos, tinka 18650 tipo.
- 2 DC/DC keitikliai (aukštinanti ir žeminanti).
- Valdiklis dviem akumuliatoriams įkrauti ir iškrauti (internete ieškokite „2s ličio jonų valdiklis“). Grandinėje naudojamas dviejų lygiagrečiai sujungtų elementų nuoseklusis jungimas, todėl išėjimo įtampa yra didesnė nei 7,4 V. Lygiagrečioji grandinė naudojama akumuliatoriaus talpai ir veikimo laikui padidinti.
Štai šio roboto maitinimo šaltinio schema:

Maitinimo šaltinio schema
Be to, roboto korpusui reikės plastiko (PVC) arba bet kokios kitos medžiagos, kurią galite atsispausdinti 3D spausdintuvu, jei turite tokią galimybę.
Šiam „pasidaryk pats“ projektui reikalinga programinė įranga. Štai atsitiktinio valymo algoritmo, kurį radome internete, pavyzdys. Eskizą atsisiųskite čia: roboto dulkių siurblio programinė įranga.
Šiame straipsnyje aptariami du robotų dulkių siurblių dizainai, kuriuos galite atkartoti ir sukonstruoti patys. Automatinį kambario valytuvą galite sukonstruoti už 30–100 USD. Brangiausi komponentai yra baterijos, varikliai ir „Arduino“ plokštės. Jei sėkmingai sukonstravote naminį robotą dulkių siurblį arba sugalvojote kitokį dizainą, pasidalykite savo pavyzdžiais komentaruose. Laukiame atviro bendravimo!
Galiausiai rekomenduojame peržiūrėti šiuos vaizdo įrašus, kuriuose aiškiai parodyta dar keletas idėjų, kaip namuose pasigaminti robotą dulkių siurblį:








Ačiū už straipsnį!
Jūsų žiniai, žodžio „dvigatelya“ rusų kalboje nėra.
Bet tai tik kosmetinis straipsnio defektas.)
Sveiki, aš esu Jurijus, baigiu statybos projektą, aplink pilna dulkių. Kilo mintis pasigaminti robotą dulkių siurblį, bet apie elektroniką žinau tik tiek, kiek mokiausi mokykloje. Apžiūrėjau keletą medžiagų, man patiko „Meleon“ šluota. Uždėjus ją ant roboto dulkių siurblio, mažas kampelis lieka neišvalytas, o horizontalų šepetį galima pasigaminti kaip tik nori.
Labai ačiū!!! Viskas aišku! O kaip užtikrinti, kad maistas būtų grąžintas į bazę?