Kā pašam izgatavot robotizētu putekļsūcēju – 2 montāžas idejas
Mūsdienu straujajā dzīvesveidā uzturēt māju tīru ne vienmēr ir viegli. Mūsdienu tehnoloģijas var palīdzēt. Robotizētie putekļsūcēji pastāv jau vairāk nekā 15 gadus. Tie parasti atgādina lielu ripu, kas pārvietojas pa istabu pēc iepriekš noteikta modeļa vai nejauši (līdz tā atsitas pret kaut ko) un savāc gružus. Mēs piedāvājam divus soli pa solim sniegtus norādījumus, kā pašam izgatavot robotizēto putekļsūcēju.
Montāžas materiāli
Tātad, lai saliktu robotizētu putekļsūcēju, jums ir jāsaprot tā sastāvdaļas, apskatīsim tās soli pa solim. Tam ir jāpārvietojas pa istabu pašam, tāpēc tam ir nepieciešami motori — divi līdz četri, atkarībā no galīgās konstrukcijas —, kā arī iespēja pārslēgt griešanās virzienu un ātrumu, kas nozīmē, ka jums ir nepieciešama motora vadības plate. Ja izmantojat līdzstrāvas motorus, jums būs nepieciešama plate ar četriem tranzistoriem (H-tilts).
Pašdarinātam robotizētam putekļsūcējam ir jākonstatē sadursmes ar sienām un mēbelēm. Tam nepieciešami šķēršļu sensori un ierobežojošie slēdži uz "bufera". Ir nepieciešams arī darba elements — putekļsūcējs. Tam jābūt projektētam darbam ar zemsprieguma līdzstrāvu (piemēram, 12 V).
Papildus putekļsūcējam ir nepieciešama rotējoša birste, kas notīrīs virsmu, pacels paklāja kaudzi un aizslaucīs gružus. Tam nepieciešams vēl viens vai divi motori.
Sistēma, kas visu šo kontrolēs. Vienkāršākais variants ir Arduino plate. Šim uzdevumam derēs jebkura plate; Nano vai Pro mini plates ir piemērota izmēra šim darbam.
1. ideja: no kartona izgatavots robotizēts putekļsūcējs
Robota pamatne ir izgatavota no bieza kartona. Vislabāk to salīmēt pāris kārtās, šķiedrām esot perpendikulāri. Tā tehniskajām sastāvdaļām būs nepieciešams šāds detaļu komplekts:
- Jebkura Arduino plate.
- Maizes dēlis vai vienkārša maizes dēlis, principā jūs varat iztikt bez tā, vienkārši visu pielodējiet.
- 2 ultraskaņas attāluma sensori (tāluma mērītājs).
- Putekļsūcēja turbīna.
- Neliels motors vai dzesētājs no datora.
- Motori ar pārnesumkārbām un riteņiem.
- Dzinēja kontrolieris.
- Vadi ķēdes savienojumiem.
- Baterijas un uzlādes kontrolieris.
Robota darbināšanai nepieciešamas trīs litija baterijas. Katras baterijas spriegums ir 3,7 V. To uzlādēšanai nepieciešams kontrolieris, piemēram, fotoattēlā redzamais:

Kontrolieris
Lai vadītu robota piedziņas motorus, ir ērti izmantot moduli, kura pamatā ir L298 mikroshēma. Šī ir H-tilta shēma, un to var salikt pats no atsevišķām komponentēm, taču gatavas plates iegāde ir uzticamāka. Tā ļauj iestatīt robota putekļsūcēja ātrumu un mainīt tā virzienu.

Vadības modulis
Lai regulētu ātrumu, PWM signāls tiek pievadīts ENA vai ENB tapai, un, lai iestatītu griešanās virzienu, pretēji signāli tiek pievadīti vienam motoram IN1 un IN2, bet otram motoram - IN3 un IN4. Ja IN1 ir loģiskā 1 un IN2 ir loģiskā 0, motors griežas vienā virzienā. Lai mainītu virzienu, samainiet 1 ar 0. Tas jāsamontē ar Arduino, izmantojot šo diagrammu (var izmantot jebkurus tapas; tos norādāt skicē).

Arduino shēma
Tālāk jums jāizgatavo kartona pamatne un jāpiestiprina tai riteņi. Jums vajadzētu iegūt kaut ko līdzīgu šim:

Kartona pamatne
Lūk, skats no apakšas. Divi piedziņas riteņi ar leņķisko pārnesumkārbu un grozāmo riteni:

Riteņu bāze
Tagad jums ir jāsamontē shēma, kas tiks uzstādīta uz pamatnes. Pamatnes diametram jābūt aptuveni 30 cm, lai tajā varētu ievietot gan elektroniku, gan pašu putekļsūcēja bloku.

Korpusa salikšana
Tālmēru vietā var izmantot uz bufera montētu sistēmu, kas savienota ar gala slēdžiem. Sadursmes gadījumā ar šķērsli vadības sistēma signalizēs par virziena maiņu.

Buferis
Kontakta buferus var izgatavot arī pats. Jums būs nepieciešams plāns, bet stingrs vads, piemēram, vītā pāra kabelis. Lai to izdarītu, bufera iekšpusē, izmantojot foliju, izveidojiet kontakta laukumu un nostipriniet vadu, kā parādīts zemāk. Kad robotizētais putekļsūcējs saduras ar mēbelēm vai sienām, tās izveidos kontaktu. Pielāgojiet attālumu no vada līdz folijai, lai sasniegtu vēlamo jutību un novērstu viltus trauksmes signālus. Folijai tiek pievadīts 5 V spriegums, un vads nonāk Arduino ieejā, caur vairāku kiloomu rezistoru pavilkts uz negatīvu polu.

Pašdarināts kontakta buferis
Ierīci darbina baterijas; vadības sistēmas barošanai var izmantot lineārus stabilizatorus, piemēram, l7805. Motora ātruma regulēšanai ir piemērots pazeminošs pārveidotājs, piemēram, LM2596.
Visgrūtāk ir putekļsūcēja projektēšana un salikšana. Šeit ir aptuvens rasējums:

Putekļsūcēja diagramma
Mēs nolaužam oriģinālās ventilatora lāpstiņas un pie rotora piestiprinām putekļsūcēja turbīnu. Ir svarīgi precīzi nostiprināt turbīnu centrā, pretējā gadījumā radīsies nelīdzsvarotība un vibrācijas.

Robota turbīna
Lūk, kā izskatās turbīnas aizmugure, kad tā ir piestiprināta pie dzesētāja rotora. To var nostiprināt ar karsto līmi vai superlīmi.

Skats uz turbīnu no iekšpuses
Tas arī viss — soli pa solim sniegta instrukcija robotizēta putekļsūcēja salikšanai no metāllūžņiem. Tā darbības algoritms ir šāds: robotizēts putekļsūcējs pārvietojas uz priekšu, līdz sastopas ar šķērsli. Pēc sadursmes (vai tuvošanās, ja izmantojat ultraskaņas tālmērus) tas apstājas, pārvietojas atpakaļ noteiktā attālumā, pagriežas nejaušā leņķī un turpina kustību.
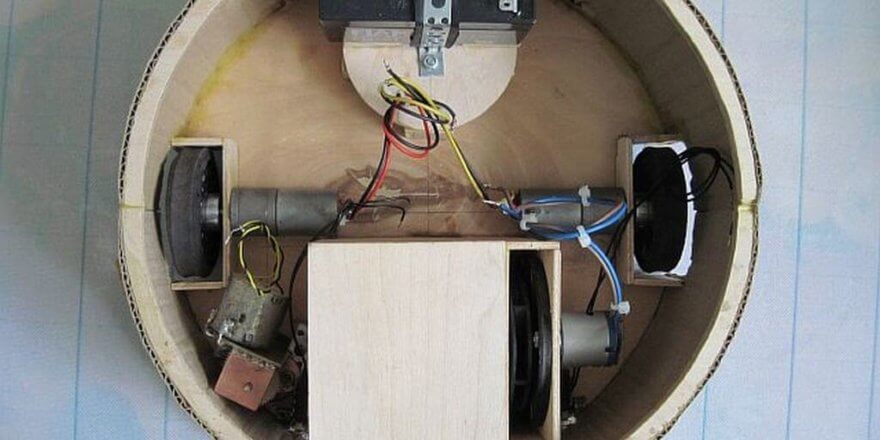
2. ideja: Gandrīz rūpnīcai līdzīgs robots
Piedāvājam jums vienkāršāku robota putekļsūcēja projektu. Lūk, kā tas izskatās saliktā veidā:

Pašdarināts robotizēts putekļsūcējs
Navigācijas sistēma ir salikta no sešiem infrasarkano staru šķēršļu sensoriem. Ja neviens no tiem nedarbojas, ir paredzēti divi kontakta sensori (robežslēdži). Motora vadības sistēma izmanto to pašu draiveri ar L298N mikroshēmu. Lai to saliktu, jums būs nepieciešams:
- Arduino plate, sākotnēji tika izmantota Pro-mini.
- USB-TTL adapteris šī Arduino modeļa programmēšanai. Ja izmantojat Arduino Nano, tas nebūs nepieciešams, jo tas atbalsta programmēšanu, izmantojot USB.
- L298N motoru draiveris.
- Motori riteņiem ar pārnesumkārbu.
- 6 infrasarkanie sensori.
- Turbīnas motori (ja iespējams, jaudīgāki).
- Putekļsūcēja turbīnas lāpstiņritenis.
- Birstes motori var būt jebkas.
- 2 sadursmes sensori.
Salieciet visu saskaņā ar šo shēmu:

Robota putekļsūcēja montāžas shēma
Lai saliktu robota putekļsūcēja barošanas ķēdi, jums būs nepieciešams:
- 4 litija baterijas, piemērots 18650 tips.
- 2 līdzstrāvas/līdzstrāvas pārveidotāji (paaugstinošie un pazeminošie).
- Kontrolieris divu akumulatoru uzlādēšanai un izlādēšanai (meklējiet tiešsaistē "2s li-ion controller"). Shēmā tiek izmantots divu paralēli savienotu elementu virknes savienojums, kā rezultātā izejas spriegums ir lielāks par 7,4 V. Paralēlā ķēde tiek izmantota, lai palielinātu akumulatora ietilpību un darbības laiku.
Šeit ir šī robota barošanas avota shēma:

Barošanas avota shēma
Turklāt robota korpusam būs nepieciešama plastmasa (PVC) vai jebkurš cits materiāls; ja jums ir šāda iespēja, varat to izdrukāt uz 3D printera.
Šim “dari pats” projektam ir nepieciešama programmaparatūra. Šeit ir nejaušas tīrīšanas algoritma piemērs, ko atradām tiešsaistē. Lejupielādējiet skici šeit: robotizēta putekļsūcēja programmaparatūra.
Šajā rakstā tika apspriesti divi robotizēto putekļsūcēju dizaini, kurus varat atkārtot un uzbūvēt pats. Automātisku istabas tīrītāju var uzbūvēt par 30 līdz 100 USD. Visdārgākās sastāvdaļas ir baterijas, motori un Arduino plates. Ja esat veiksmīgi uzbūvējis paštaisītu robotizēto putekļsūcēju vai izdomājis citu dizainu, lūdzu, dalieties ar saviem piemēriem komentāros. Mēs atzinīgi vērtējam atklātu komunikāciju!
Visbeidzot, iesakām noskatīties šos videoklipus, kuros skaidri parādītas vēl dažas idejas robotizēta putekļsūcēja izgatavošanai mājās:








Paldies par rakstu!
Jūsu zināšanai, vārds “dvigatelja” krievu valodā neeksistē.
Bet tas ir tikai raksta kosmētisks defekts.)
Sveiki, esmu Jurijs un pabeidzu būvniecības projektu. Putekļu jūra ir klāt. Man radās ideja uztaisīt robotu putekļsūcēju, bet par elektroniku zinu tikai tik daudz, cik skolā. Apskatīju dažus materiālus, man patika Meleon slota, ja to uzliks uz robota putekļsūcēja, neliels stūrītis paliks netīrs, bet horizontālo birsti var uztaisīt, kā vien vēlas.
Liels paldies!!! Tas ir pilnīgi skaidrs! Un kā es varu nodrošināt, ka pārtika tiek atgriezta bāzē?