Com fer un robot aspirador tu mateix: 2 idees de muntatge
En l'estil de vida accelerat d'avui dia, mantenir la llar neta no sempre és fàcil. La tecnologia moderna pot ajudar. Els aspiradors robot existeixen des de fa més de 15 anys. Normalment s'assemblen a un disc gran que es mou per l'habitació segons un patró preestablert o aleatòriament (fins que xoca amb alguna cosa) i recull les deixalles. Oferim dues instruccions pas a pas sobre com fer el vostre propi aspirador robot.
Materials per al muntatge
Així doncs, per muntar un robot aspirador, cal entendre els seus components; anem a repassar-los pas a pas. Ha de moure's per l'habitació sol, per la qual cosa necessita motors (de dos a quatre, depenent del disseny final), així com la capacitat de canviar la direcció de rotació i la velocitat, cosa que significa que necessiteu una placa de control del motor. Si utilitzeu motors de corrent continu, necessitareu una placa amb quatre transistors (un pont en H).
Un robot aspirador casolà ha de detectar col·lisions amb parets i mobles. Això requereix sensors d'obstacles i interruptors de límit al "para-xocs". També cal l'element de treball, l'aspirador. Ha d'estar dissenyat per funcionar amb alimentació de CC de baix voltatge (per exemple, 12 V).
A més d'un aspirador, necessiteu un raspall giratori que netegi la superfície, aixequi la pila de la catifa i escombri les restes. Això requereix un o dos motors més.
Un sistema que controli tot això. L'opció més senzilla és una placa Arduino. Qualsevol placa servirà per a aquesta tasca; les plaques Nano o Pro mini tenen la mida adequada per a la feina.
Idea #1: Un robot aspirador fet de cartró
La base del robot està feta de cartró gruixut. És millor enganxar-lo en un parell de capes, amb les fibres alineades perpendicularment. Per als seus components tècnics, necessitareu el següent conjunt de peces:
- Qualsevol placa Arduino.
- Placa de proves o una placa de proves simple, en principi es pot prescindir-ne, només cal soldar-ho tot.
- 2 sensors de distància ultrasònics (telèmetre).
- Turbina d'aspiradora.
- Un petit motor o refrigerador d'un ordinador.
- Motors amb caixes de canvis i rodes.
- Controlador del motor.
- Cables per a connexions de circuits.
- Bateries i controlador de càrrega.
El robot necessita tres bateries de liti per alimentar-lo. Cadascuna té un voltatge de 3,7 V. Cal un controlador per carregar-les, com el de la foto:

Controlador
Per controlar els motors d'accionament del robot, és convenient utilitzar un mòdul basat en un microxip L298. Aquest és un circuit de pont H, i el podeu construir vosaltres mateixos a partir de components individuals, però comprar una placa ja feta és més fiable. Us permet configurar la velocitat del robot aspirador i canviar-ne la direcció.

Mòdul de control
Per regular la velocitat, s'aplica un senyal PWM al pin ENA o ENB, i per establir la direcció de rotació, s'apliquen senyals oposats a IN1 i IN2 per a un motor i a IN3 i IN4 per a l'altre motor. Si IN1 està en un 1 lògic i IN2 en un 0 lògic, el motor gira en una direcció. Per canviar la direcció, intercanvieu els 1 pels 0. S'ha de muntar amb un Arduino utilitzant el diagrama següent (podeu utilitzar qualsevol pin; els especifiqueu a l'esbós).

Circuit Arduino
A continuació, heu de fer una base de cartró i enganxar-hi les rodes. Hauríeu d'obtenir alguna cosa com això:

Base de cartró
Aquí teniu una vista des de baix. Dues rodes motrius amb una caixa de canvis angular i una roda giratòria:

Distància entre eixos
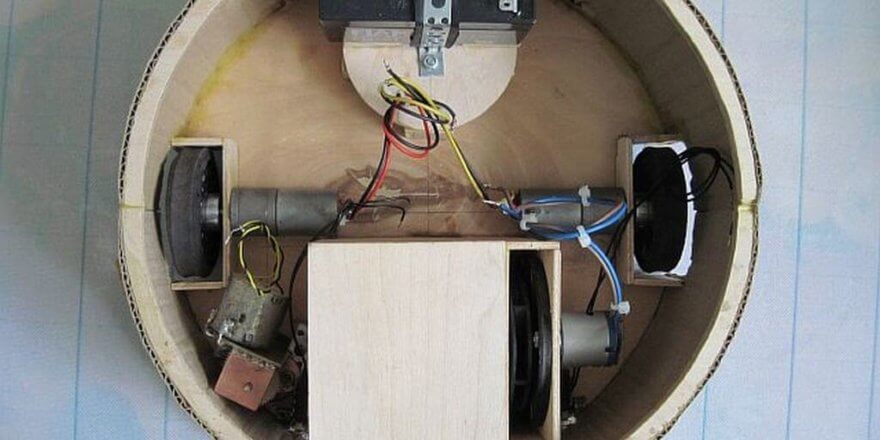
Ara heu de muntar el circuit que es muntarà a la base. La base ha de tenir uns 30 cm de diàmetre per allotjar tant l'electrònica com la unitat de l'aspiradora.

Muntatge de la caixa
En lloc de telèmetres, podeu utilitzar un sistema muntat al para-xocs connectat a interruptors de límit. En cas de col·lisió amb un obstacle, el sistema de control indicarà un canvi de direcció.

Para-xocs
També podeu fer els amortidors de contacte vosaltres mateixos. Necessitareu un cable prim però rígid, com ara un cable de parell trenat. Per fer-ho, creeu una zona de contacte a l'interior del amortidor amb paper d'alumini i fixeu el cable tal com es mostra a continuació. Quan el robot aspirador xoqui amb mobles o parets, faran contacte. Ajusteu la distància del cable al paper d'alumini per aconseguir la sensibilitat desitjada i evitar falses alarmes. S'apliquen 5V al paper d'alumini i el cable va a l'entrada de l'Arduino, estirat a negatiu a través d'una resistència de diversos quiloohms.

Para-xocs de contacte casolà
El dispositiu funciona amb bateries; es poden utilitzar estabilitzadors lineals com el l7805 per alimentar el sistema de control. Un convertidor reductor, com el LM2596, és adequat per ajustar la velocitat del motor.
La part més difícil és dissenyar i muntar l'aspiradora. Aquí teniu un dibuix aproximat:

Diagrama d'aspiradora
Desmuntem les pales originals del ventilador i fixem una turbina d'aspiradora al seu rotor. És important fixar la turbina amb precisió al centre, ja que si no, es crearan desequilibris i vibracions.

Turbina robotitzada
Així és com es veu la part posterior de la turbina quan està fixada al rotor del refrigerador. Es pot fixar amb cola calenta o supercola.

Vista de la turbina des de l'interior
Això és tot, una guia pas a pas per muntar un robot aspirador fet amb materials de rebuig. El seu algoritme de funcionament és el següent: el robot aspirador avança fins que troba un obstacle. Després de la col·lisió (o aproximació, si feu servir telèmetres ultrasònics), s'atura, retrocedeix una distància predeterminada, gira en un angle aleatori i continua movent-se.
Idea #2: Un robot gairebé semblant a una fàbrica
Us presentem un projecte de robot aspirador més senzill. Així és com queda un cop muntat:

Aspiradora robòtica casolana
El sistema de navegació està muntat a partir d'un conjunt de sis sensors d'obstacles infrarojos. En cas que cap d'ells s'activi, es proporcionen dos sensors de contacte (interruptors de límit). El sistema de control del motor utilitza el mateix controlador amb un microxip L298N. Per muntar-lo, necessitareu:
- Placa Arduino, originalment es va utilitzar una Pro-mini.
- Un adaptador USB-TTL per programar aquest model d'Arduino. Si feu servir un Arduino Nano, no el necessitareu, ja que admet la programació via USB.
- Controlador per a motors L298N.
- Motors per a rodes amb caixa de canvis.
- 6 sensors d'infrarojos.
- Motors per a la turbina (si és possible, més potents).
- Impulsor de turbina d'aspiradora.
- Els motors de raspalls poden ser qualsevol cosa.
- 2 sensors de col·lisió.
Munta tot això segons aquest esquema:

Esquema de muntatge d'un aspirador robot
Per muntar el circuit d'alimentació d'un robot aspirador necessitareu:
- 4 bateries de liti, tipus 18650, són adequades.
- 2 convertidors CC/CC (elevadors i reductors).
- Un controlador per carregar i descarregar dues bateries (cerca en línia "controlador de ions de liti 2s"). El circuit utilitza una connexió en sèrie de dues cel·les connectades en paral·lel, cosa que resulta en una tensió de sortida superior a 7,4 V. El circuit en paral·lel s'utilitza per augmentar la capacitat i la durada de la bateria.
Aquí teniu el diagrama de la font d'alimentació d'aquest robot:

Diagrama de la font d'alimentació
A més, necessitareu plàstic (PVC) o qualsevol altre material per al cos del robot; podeu imprimir-lo en una impressora 3D si teniu aquesta oportunitat.
Aquest projecte de bricolatge requereix firmware. Aquí teniu un exemple d'un algoritme de neteja aleatori que hem trobat en línia. Baixeu l'esbós aquí: firmware per a un robot aspirador.
Aquest article tracta dos dissenys de robots aspiradors que podeu replicar i construir vosaltres mateixos. Podeu construir un netejador d'habitacions automàtic per entre 30 i 100 dòlars. Els components més cars són les bateries, els motors i les plaques Arduino. Si heu aconseguit construir un robot aspirador casolà o heu creat un disseny diferent, compartiu els vostres exemples als comentaris. Agraïm la comunicació oberta!
Finalment, recomanem veure aquests vídeos, que mostren clarament algunes idees més per fer un robot aspirador a casa:








Gràcies per l'article!
Per a la vostra informació, «dvigatelya» no és una paraula en rus.
Però això només és un defecte estètic de l'article.)
Hola, sóc en Yuri, estic acabant un projecte de construcció, hi ha un mar de pols, tenia la idea de fer un robot aspirador, però només en sé tant d'electrònica com en sé a l'escola. He mirat alguns materials, m'ha agradat el raspall d'escombra Meleon, si el poses en un robot aspirador, et deixarà una petita cantonada sense netejar, i el raspall horitzontal es pot fer com vulguis.
Moltes gràcies!!! Això està molt clar! I com puc assegurar-me que el menjar torni a la base?