如何自製掃地機器人—兩種組裝方法
在現今快節奏的生活中,保持居家清潔並非易事。現代科技可以助您一臂之力。掃地機器人問世超過15年。它們通常形狀像一個大圓盤,會按照預設的模式或隨機移動(直到碰到障礙物)在房間裡清掃灰塵和碎屑。我們在此提供兩份逐步指南,教您如何自製一台掃地機器人。
組裝材料
所以,要組裝一台掃地機器人,你需要了解它的各個零件,我們一步一步來。它需要能夠自主地在房間裡移動,因此需要馬達——根據最終設計,馬達數量從兩到四個不等——以及能夠切換旋轉方向和速度的功能,這意味著你需要一塊馬達控制板。如果你使用的是直流電機,則需要一個帶有四個晶體管(H橋)的電路板。
自製掃地機器人必須能夠偵測與牆壁和家具的碰撞。這就需要在「保險桿」上安裝障礙物感測器和限位開關。此外,還需要掃地機器人本身作為工作部件。它必須設計成可以使用低壓直流電源(例如12V)運作。
除了吸塵器之外,你還需要一個旋轉刷頭,它可以清潔表面、提起地毯絨毛並掃除碎屑。這需要一到兩個額外的馬達。
一個能夠控制這一切的系統。最簡單的選擇是Arduino開發板。任何開發板都能勝任這項任務;Nano或Pro mini開發板的尺寸正合適。
方案一:用紙板製作的機器人吸塵器
機器人的底座由厚紙板製成。最好用膠水分幾層黏合,並確保纖維方向垂直。其技術組件需要以下零件:
- 任何Arduino開發板。
- 麵包板或簡易麵包板,原則上可以不用,直接把所有元件焊接起來就行了。
- 2 個超音波測距感測器(測距儀)。
- 吸塵器渦輪。
- 電腦裡的小型馬達或散熱器。
- 帶變速箱和車輪的馬達。
- 發動機控制器。
- 電路連接用導線。
- 電池和充電控制器。
機器人需要三顆鋰電池供電,每顆電池電壓為 3.7V。需要一個控制器來為它們充電,例如照片中的那種:

控制器
為了控制機器人的驅動電機,使用基於L298微晶片的模組非常方便。這是一個H橋電路,你可以用單一元件自行搭建,但購買現成的電路板更可靠。它允許你設定掃地機器人的速度並改變其方向。

控制模組
為了調節轉速,需對 ENA 或 ENB 接腳施加 PWM 訊號;為了設定旋轉方向,需向 IN1 和 IN2(一個馬達)或 IN3 和 IN4(另一個馬達)施加相反的訊號。如果 IN1 為邏輯 1,IN2 為邏輯 0,則馬達沿一個方向旋轉。要改變旋轉方向,只需交換 IN1 和 IN2 的邏輯 0 即可。此電路應使用 Arduino 開發板,並參考下列電路圖進行組裝(可使用任意引腳,只需在電路圖中指定即可)。

Arduino電路
接下來,你需要用紙板做一個底座,然後把輪子固定在上面。成品應該是這樣:

紙板底座
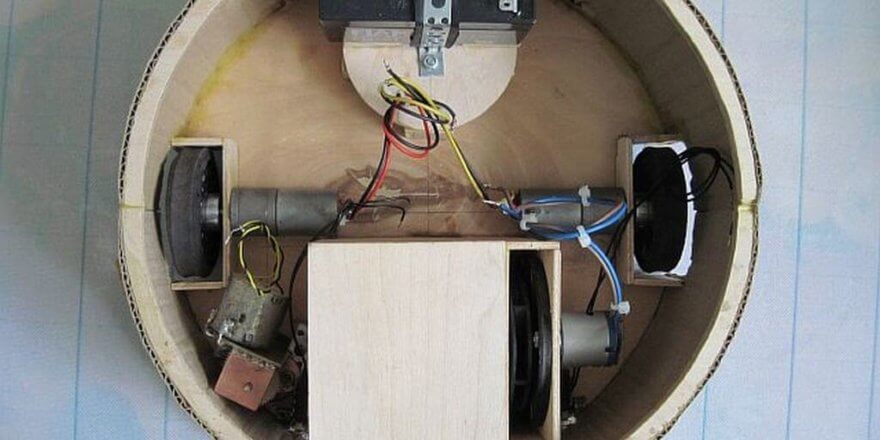
這是從底部看到的景象。兩個驅動輪,一個帶角度的變速箱和一個萬向輪:

軸距
現在你需要組裝將要安裝在底座上的電路。底座直徑應約為30厘米,以便容納電子元件和吸塵器主機本身。

組裝箱子
你可以不用測距儀,而是使用安裝在保險桿上的系統,該系統連接到限位開關。當車輛與障礙物發生碰撞時,控制系統會發出改變方向的訊號。

保險桿
你也可以自己做接觸式緩衝器。你需要一條細而硬的導線,例如雙絞線。具體做法是:用錫箔紙在緩衝器內側製作一個接觸墊,並將導線固定好,如下圖所示。當掃地機器人撞到家具或牆壁時,它們就會接觸。調整導線到錫箔紙的距離,以達到所需的靈敏度並防止誤報。將5V電壓施加到錫箔紙上,導線連接到Arduino的輸入端,並透過一個數千歐姆的電阻上拉至負極。

自製接觸緩衝墊
該設備由電池供電;可使用諸如L7805之類的線性穩壓器為控制系統供電。降壓轉換器(例如LM2596)適用於調節馬達轉速。
最困難的部分是設計和組裝吸塵器。以下是草圖:

吸塵器示意圖
我們拆下原有的風扇葉片,然後將吸塵器的渦輪機安裝到它的轉子上。務必將渦輪機精確地固定在中心位置,否則會造成不平衡和振動。

機器人渦輪機
這是渦輪機背面連接到冷卻轉子後的樣子。可以用熱熔膠或強力膠固定。

從內部看到的渦輪機
這就是全部內容,一步一步教你如何用廢棄材料組裝一台掃地機器人。它的運作原理如下:掃地機器人向前移動,直到遇到障礙物。碰撞(或接近,如果你使用的是超音波測距儀)後,它會停止,後退一段預設距離,隨機轉彎,然後繼續前進。
方案二:一種類似工廠的機器人
我們向您展示一個更簡單的掃地機器人專案。組裝完成後,它的樣子如下:

自製機器人吸塵器
導航系統由六個紅外線障礙物感測器組成。如果所有感測器均未被觸發,則使用兩個接觸式感測器(限位開關)。馬達控制系統使用相同的驅動器和 L298N 微晶片。組裝系統需要以下零件:
- 最初使用的是 Arduino Pro-mini 開發板。
- 用於對這款 Arduino 開發板進行編程的 USB-TTL 轉接器。如果您使用的是 Arduino Nano,則無需此轉接器,因為它支援透過 USB 進行程式設計。
- L298N馬達驅動器。
- 帶變速箱的車輪馬達。
- 6個紅外線感測器。
- 渦輪機馬達(如果可能,功率更大)。
- 吸塵器渦輪葉輪。
- 有刷馬達可以是任何東西。
- 2個碰撞感測器。
請依照以下方案組裝所有零件:

機器人吸塵器組裝圖
組裝掃地機器人的電源電路,你需要:
- 4顆鋰電池,18650型即可。
- 2 個 DC/DC 轉換器(升壓和降壓)。
- 用於兩顆電池進行充放電的控制器(可在網路上搜尋「2S鋰離子電池控制器」)。此電路採用兩節並聯電池串聯的方式,輸出電壓大於7.4V。並聯電路用於提高電池容量和延長電池壽命。
這是機器人的電源電路圖:

電源圖
此外,您還需要塑膠(PVC)或其他材料來製作機器人身體;如果您有條件,可以用 3D 列印機列印出來。
這個DIY專案需要韌體。這裡有一個我們從網路上找到的隨機清潔演算法範例。點此下載程式: 機器人吸塵器的韌體。
本文介紹了兩種可以自行複製和製作的機器人吸塵器設計。您可以用 30 到 100 美元打造一台自動房間清潔器。其中最昂貴的部件是電池、馬達和 Arduino 開發板。如果您已經成功製作了自製機器人吸塵器,或者想出了不同的設計方案,請在評論區分享您的作品。我們歡迎大家暢所欲言!
最後,我們推薦觀看以下視頻,其中清晰地展示了更多在家自製掃地機器人的方法:








謝謝你的文章!
供您參考,「dvigatelya」在俄語中不是一個字。
但這只是文章的一個表面瑕疵。 )
大家好,我是尤里,我正在完成一個建築項目,到處都是灰塵。我突發奇想,想做一個掃地機器人,但我對電子的知識只限於學校裡學的那些。我研究了一些材料,很喜歡Meleon的掃帚刷頭。如果把它裝在掃地機器人上,它只會漏掉一個小角落,而且水平刷頭可以根據需要隨意製作。
非常感謝! ! !這下明白了吧!那我該如何確保食物能送回基地呢?