Wie man einen Saugroboter selbst baut – 2 Bauideen
Im heutigen schnelllebigen Alltag ist es nicht immer einfach, das Zuhause sauber zu halten. Moderne Technologie kann hier Abhilfe schaffen. Saugroboter gibt es schon seit über 15 Jahren. Sie sehen in der Regel aus wie ein großer Puck, der sich entweder nach einem voreingestellten Muster oder zufällig (bis er auf ein Hindernis stößt) durch den Raum bewegt und Schmutz aufsaugt. Wir bieten zwei Schritt-für-Schritt-Anleitungen, wie Sie Ihren eigenen Saugroboter bauen können.
Materialien für die Montage
Um einen Saugroboter zusammenzubauen, müssen Sie seine Komponenten verstehen. Gehen wir sie Schritt für Schritt durch. Er muss sich selbstständig im Raum bewegen können, benötigt also Motoren – zwei bis vier, je nach Ausführung – sowie die Möglichkeit, Drehrichtung und Geschwindigkeit zu ändern. Dafür benötigen Sie eine Motorsteuerplatine. Bei Gleichstrommotoren benötigen Sie eine Platine mit vier Transistoren (eine H-Brücke).
Ein selbstgebauter Saugroboter muss Kollisionen mit Wänden und Möbeln erkennen. Dazu benötigt er Hindernissensoren und Endschalter am Stoßfänger. Auch das eigentliche Arbeitselement – der Saugroboter – ist erforderlich. Er muss für den Betrieb mit Niederspannungs-Gleichstrom (z. B. 12 V) ausgelegt sein.
Zusätzlich zum Staubsauger benötigen Sie eine rotierende Bürste, die die Oberfläche reinigt, den Teppichflor aufrichtet und Schmutz entfernt. Hierfür sind ein oder zwei weitere Motoren erforderlich.
Ein System, das all dies steuert. Die einfachste Lösung ist ein Arduino-Board. Jedes Board eignet sich dafür; die Nano- oder Pro-Mini-Boards haben die passende Größe.
Idee Nr. 1: Ein Staubsaugerroboter aus Pappe
Die Basis des Roboters besteht aus dicker Pappe. Am besten klebt man sie in mehreren Lagen zusammen, wobei die Fasern senkrecht zueinander verlaufen sollten. Für die technischen Komponenten benötigen Sie folgende Teile:
- Jedes Arduino-Board.
- Ein Steckbrett oder ein einfaches Steckbrett ist im Prinzip auch nicht nötig; man kann einfach alles verlöten.
- 2 Ultraschall-Distanzsensoren (Entfernungsmesser).
- Staubsaugerturbine.
- Ein kleiner Motor oder Kühler aus einem Computer.
- Motoren mit Getrieben und Rädern.
- Motorsteuergerät.
- Drähte für Stromkreisverbindungen.
- Batterien und Laderegler.
Der Roboter benötigt drei Lithiumbatterien zur Stromversorgung. Jede Batterie hat eine Spannung von 3,7 V. Zum Laden wird ein Controller benötigt, wie beispielsweise der auf dem Foto abgebildete:

Regler
Zur Steuerung der Antriebsmotoren des Roboters bietet sich ein Modul mit einem L298-Mikrochip an. Es handelt sich dabei um eine H-Brücken-Schaltung, die man zwar selbst aus Einzelteilen aufbauen kann, der Kauf einer fertigen Platine ist jedoch zuverlässiger. Mit ihr lassen sich die Geschwindigkeit des Saugroboters einstellen und seine Fahrtrichtung ändern.

Steuermodul
Zur Drehzahlregelung wird ein PWM-Signal an den ENA- oder ENB-Pin angelegt. Um die Drehrichtung festzulegen, werden für den einen Motor entgegengesetzte Signale an IN1 und IN2 und für den anderen Motor an IN3 und IN4 angelegt. Liegt an IN1 der Pegel 1 und an IN2 der Pegel 0, dreht sich der Motor in eine Richtung. Um die Drehrichtung zu ändern, werden die Einsen mit den Nullen vertauscht. Der Aufbau erfolgt mit einem Arduino gemäß dem folgenden Schaltplan (Sie können beliebige Pins verwenden; diese werden im Sketch angegeben).

Arduino-Schaltung
Als Nächstes bastelst du eine Basis aus Pappe und befestigst die Räder daran. Das Ergebnis sollte in etwa so aussehen:

Kartonbasis
Hier die Ansicht von unten. Zwei Antriebsräder mit einem Winkelgetriebe und einem Lenkrad:

Radstand
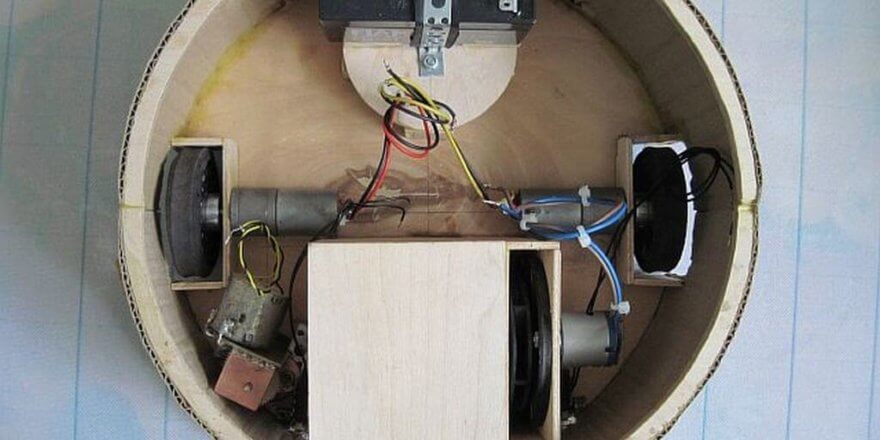
Nun müssen Sie die Schaltung zusammenbauen, die auf dem Sockel montiert wird. Der Sockel sollte einen Durchmesser von etwa 30 cm haben, um sowohl die Elektronik als auch das Staubsaugergerät selbst aufzunehmen.

Zusammenbau des Gehäuses
Anstelle von Entfernungsmessern kann ein am Stoßfänger montiertes System verwendet werden, das mit Endschaltern verbunden ist. Bei einer Kollision mit einem Hindernis signalisiert das Steuerungssystem eine Richtungsänderung.

Stoßstange
Sie können die Kontaktpuffer auch selbst herstellen. Dazu benötigen Sie einen dünnen, aber starren Draht, beispielsweise ein verdrilltes Adernpaar. Erstellen Sie dazu mit Alufolie eine Kontaktfläche auf der Innenseite des Puffers und befestigen Sie den Draht wie unten abgebildet. Wenn der Saugroboter mit Möbeln oder Wänden kollidiert, wird Kontakt hergestellt. Passen Sie den Abstand zwischen Draht und Folie an, um die gewünschte Empfindlichkeit zu erreichen und Fehlalarme zu vermeiden. An die Folie werden 5 V angelegt, und der Draht wird über einen Widerstand von einigen Kiloohm an den Arduino-Eingang angeschlossen und dort auf Massepotenzial gezogen.

Selbstgebauter Kontaktpuffer
Das Gerät wird mit Batterien betrieben; zur Stromversorgung des Steuerungssystems können Linearregler wie der L7805 verwendet werden. Ein Abwärtswandler, beispielsweise der LM2596, eignet sich zur Einstellung der Motordrehzahl.
Die größte Herausforderung besteht darin, den Staubsauger zu konstruieren und zusammenzubauen. Hier ist eine grobe Skizze:

Staubsaugerdiagramm
Wir entfernen die originalen Lüfterflügel und befestigen eine Staubsaugerturbine an ihrem Rotor. Es ist wichtig, die Turbine exakt in der Mitte zu fixieren, da sonst Unwuchten und Vibrationen entstehen.

Roboterturbine
So sieht die Rückseite der Turbine aus, wenn sie am Kühlerrotor befestigt ist. Sie kann mit Heißkleber oder Sekundenkleber fixiert werden.

Blick auf die Turbine von innen
Das ist schon alles – eine Schritt-für-Schritt-Anleitung zum Bau eines Saugroboters aus Schrottmaterialien. Sein Funktionsprinzip ist folgendes: Der Saugroboter fährt vorwärts, bis er auf ein Hindernis trifft. Nach der Kollision (oder Annäherung, falls Ultraschall-Entfernungsmesser verwendet werden) hält er an, fährt eine voreingestellte Strecke zurück, dreht sich in einem zufälligen Winkel und fährt weiter.
Idee Nr. 2: Ein fast fabrikähnlicher Roboter
Wir stellen Ihnen ein einfacheres Projekt für einen Saugroboter vor. So sieht er im zusammengebauten Zustand aus:

Selbstgebauter Roboterstaubsauger
Das Navigationssystem besteht aus sechs Infrarot-Hindernissensoren. Falls keiner der Sensoren auslöst, greifen zwei Kontaktsensoren (Endschalter) ein. Die Motorsteuerung verwendet denselben Treiber mit einem L298N-Mikrochip. Für den Aufbau benötigen Sie:
- Es wurde ein Arduino-Board verwendet, ursprünglich ein Pro-mini.
- Ein USB-TTL-Adapter zur Programmierung dieses Arduino-Modells. Wenn Sie einen Arduino Nano verwenden, benötigen Sie ihn nicht, da dieser die Programmierung über USB unterstützt.
- Treiber für L298N-Motoren.
- Motoren für Räder mit Getriebe.
- 6 IR-Sensoren.
- Motoren für die Turbine (wenn möglich, leistungsstärkere).
- Turbinenlaufrad eines Staubsaugers.
- Bürstenmotoren können alles Mögliche sein.
- 2 Kollisionssensoren.
Stellen Sie alles nach diesem Schema zusammen:

Montageplan für einen Saugroboter
Zum Aufbau des Stromversorgungsschaltkreises eines Saugroboters benötigen Sie:
- Es werden 4 Lithiumbatterien des Typs 18650 benötigt.
- 2 DC/DC-Wandler (Aufwärts- und Abwärtswandler).
- Ein Laderegler für zwei Akkus (suchen Sie online nach „2s Li-Ion-Laderegler“). Die Schaltung nutzt eine Reihenschaltung zweier parallelgeschalteter Zellen, wodurch eine Ausgangsspannung von über 7,4 V erreicht wird. Die Parallelschaltung dient der Erhöhung der Kapazität und der Lebensdauer der Akkus.
Hier ist der Schaltplan für die Stromversorgung dieses Roboters:

Stromversorgungsdiagramm
Darüber hinaus benötigen Sie Kunststoff (PVC) oder ein anderes Material für den Roboterkörper; falls Sie die Möglichkeit dazu haben, können Sie ihn mit einem 3D-Drucker ausdrucken.
Für dieses DIY-Projekt wird Firmware benötigt. Hier ist ein Beispiel für einen zufälligen Reinigungsalgorithmus, den wir online gefunden haben. Laden Sie den Sketch hier herunter: Firmware für einen SaugroboterDie
Dieser Artikel beschreibt zwei Baupläne für Saugroboter, die Sie nachbauen können. Ein solcher automatischer Raumreiniger lässt sich für 30 bis 100 US-Dollar realisieren. Die teuersten Komponenten sind Batterien, Motoren und Arduino-Boards. Wenn Sie bereits erfolgreich einen Saugroboter selbst gebaut oder einen anderen Entwurf entwickelt haben, teilen Sie Ihre Beispiele gerne in den Kommentaren. Wir freuen uns auf den Austausch!
Zum Schluss empfehlen wir Ihnen, sich diese Videos anzusehen, die Ihnen weitere Ideen für den Bau eines Staubsaugerroboters zu Hause veranschaulichen:








Danke für den Artikel!
Zur Information: „dvigatelya“ ist kein russisches Wort.
Dies ist jedoch nur ein kosmetischer Mangel des Artikels.)
Hallo, ich bin Yuri. Ich bin gerade mit einem Bauprojekt fertig und es herrscht überall Staub. Ich hatte die Idee, einen Saugroboter zu bauen, kenne mich aber in Elektronik nur so gut aus wie in der Schule. Ich habe mir verschiedene Materialien angesehen und die Meleon-Besenbürste hat mir gut gefallen. Wenn man sie an einen Saugroboter anbringt, bleibt eine kleine Ecke unberührt, und die horizontale Bürste kann man nach Belieben gestalten.
Vielen Dank!!! Das ist sehr verständlich! Und wie stelle ich sicher, dass die Lebensmittel zur Basis zurückgebracht werden?